
Å·Ä·ĮśŗģŗÓÖŻÅ·Ä·Įś×Ü“śĄķ
ĮŖĻµČĖ£ŗ Š¤¾Ąķ
æĶ·žµē»°£ŗ0577-61736525
×ÉŃÆČČĻߣŗ 18057774865
Email £ŗ 602404047@qq.com
Q Q £ŗ 602404047
18057774865±¾¹«Ė¾£Ø½ņĢģµēĘų£©“śĄķ”¢¾ĻśŅ»ĻµĮŠ**Ę·ÅĘ¹ś²ś”¢½ųæŚµēĘų£ŗ
½ųæŚ£ŗ**ŃĒµĀæĶ£¬Ī÷ĆÅ×Ó£¬Ź©ÄĶµĀ£¬Å·Ä·Įś£¬Ć÷Ī³µēŌ“£¬±¶¼Óø££¬°ĀĶŠÄįæĖĖ¹£¬ABB£¬ø»Źæ£¬ĀŽøńĄŹ£¬LS²śµē£¬ĢØ°²£¬ČżĮā»śµē£¬**ŃōĆ÷”¢Ź©æĖ”¢Ņ×ø£ĆÅ”£
¹ś²ś£ŗ³£ŹģæŖ¹Ų”¢ÕżĢ©”¢µĀĮ¦Ī÷”¢ĢģĖ®”¢ÉĻŗ£ČĖĆń”¢ŗ¼ÖŻÖ®½”¢±£ĆĖ½Ó½üæŖ¹Ų”¢²śĘ·ĘėČ« ”£

ĪĀÖŻ½ņĢģµēĘųŹĒŅ»¼Ņ×ØŅµÉś²ś”¢ŃŠ·¢”¢Ć³Ņ×”¢·žĪńÓŚŅ»ĢåµÄ“óŠĶĻÖ“ś»Æ¹¤ŅµĘóŅµÖ÷µ¼²śĘ·ŅŌøßµĶŃ¹³ÉĢ×Éč±ø”¢Źä±äµēÉč±ø”¢½ØÖžµēĘų”¢»ś“²µēĘ÷”¢¼°µēĘ÷ŌŖ¼ž”¢Š”ŠĶ¶ĻĀ·Ę÷£¬Ē½±ŚæŖ¹ŲµČ£¬ĢŲ±šŹĒĖÜæĒĶøĆ÷¶ĻĀ·Ę÷Źō¹ś¼Ź¹śÄŚĶ¬ŠŠ**Éś²śŃŠ·¢£¬¹«Ė¾ÓµÓŠŠŪŗńµÄ¼¼ŹõæŖ·¢Į¦Į棬**µÄ¹¤ŅÕ¼ģ²āŅĒĘ÷ŗĶÉś²śÉč±ø”£¹«Ė¾×Ō““½ØŅŌĄ“£¬¹¹½ØĮĖ¶ą²ć“ĪµÄÓŖĻśĶųĀē£¬±é²¼Č«¹ś£¬²¢³öæŚÖŠ¶«”¢ÄĻ·Ē”¢¶«ÄĻŃĒ”¢ÄĻĆĄµČ¹ś¼ŅŗĶµŲĒų”£ ĪŅĆĒ±ü³Š”°¹ć·ŗŗĻ×÷”¢³§ÉĢ¹²Ó®”¢¹²Ķ¬æŖ·¢”¢ŠÆŹÖ¹²½ų”±µÄĄķÄī£¬¼į³ÖŅŌŹŠ³”ĪŖµ¼Ļņ£¬ÖŹĮæĪŖÉśĆü£¬æĘ¼¼½ų²½ĪŖ¶ÆĮ¦µÄ·¢Õ¹·½Õė£¬¼į³Ö**µÄ²śĘ·£¬ŗĻĄķµÄ¼Ūøń£¬**µÄ·žĪń»ŲĄ”æĶ»§ŗĶÉē»į”£ ½ß³Ļ»¶Óŗ£ÄŚĶāŠĀĄĻæĶ»§Ą“¹«Ė¾Ē¢ĢøŗĻ×÷£¬¹²““»Ō»Ķ”£

Ō×°**£¬¼ŁŅ»ÅāŹ®£¬“óĮæĻÖ»õ¹©ÄśŃ”Ōń”¢¹©Äś²É¹ŗ”£

×ŌÉĻŹĄ¼ĶĘߏ®Äź“ś³õĘŚ½ųČėÖŠ¹ś£¬Å·Ä·ĮśŅ»Ö±ÓėÖŠ¹śÖĘŌģŅµ¹²Ķ¬Ē°½ų£¬¹¹ÖžĮĖ¼ÆŃŠ·¢”¢Éč¼Ę”¢Éś²ś”¢ĻśŹŪŗĶ·žĪńÓŚŅ»ĢåµÄČ«·½Ī»¾ÓŖ¹ÜĄķĢåÖĘ£¬ĪŖ¹¹Öž”°°²ŠÄ”±”¢”°°²Č«”±”¢”°»·±£”¢”°½”æµ”±µÄ±¾µŲÉē»į×ö³ö¹±Ļ×”£
ŌēŌŚÉĻŹĄ¼ĶĘߏ®Äź“ś³õĘŚ£¬Ź±ČĪ¹śĆ³“Ł¾©¶¼×ܾÖø±»į³¤µÄĮ¢ŹÆŅ»ÕęĻČÉś£¬×÷ĪŖ¾¼Ć½ē“ś±ķ£¬æŖŹ¼ĮĖÓėÖŠ¹śµÄ½»Į÷ŗĻ×÷”£Ąś¾70Äź“śµÄ¼¼Źõ½»Į÷£¬80Äź“śµÄĪÆĶŠ¼Ó¹¤£¬90Äź“śÖ±½ÓĶ¶×ŹÓėÉś²ś£¬½ųČė¶žŹ®Ņ»ŹĄ¼Ķ£¬Å·Ä·ĮśÓĄ“ĮĖ”°ŌŁĶ¶×Ź”¢ŠĶ¬““Ōģ”±µÄŠĀ½×¶Ī”£½ŲÖ¹µ½2017Äź3ŌĀ£¬“óÖŠ»ŖĒųµÄĻśŹŪ¶ī“ļ1478ŅŚČÕŌŖ£¬Ō±¹¤ŅŃ³¬¹ż12000ČĖ£¬
Å·Ä·Įś×Ō¶Æ»Æ£ØÖŠ¹ś£©ÓŠĻŽ¹«Ė¾ŹĒŅ»¼ŅŅżĮģ¹¤Ņµ×Ō¶Æ»Æ²śĘ·ŗĶÓ¦ÓĆ**¼¼ŹõµÄæē¹ś¹«Ė¾£¬×÷ĪŖÅ·Ä·ĮśČ«ĒņŹĀŅµµÄŅ»²æ·Ö£¬ĖüŅŃ¾³ÉĪŖ×Ō¶Æ»ÆĮģÓņµÄŁ®Ł®Õß”£ŌŚÖŠ¹ś£¬Å·Ä·Įś×Ō¶Æ»Æ£ØÖŠ¹ś£©ÓŠĻŽ¹«Ė¾½ØÓŠŃŠ·¢”¢Éś²ś”¢¼¼Źõ·žĪńŗĶĪļĮ÷»łµŲ£¬ŌŚ»Ŗ±±”¢»Ŗ¶«ŗĶ»ŖÄĻÓµÓŠĻśŹŪ¹«Ė¾£¬ĘäĻĀŹō40¶ąøöŹĀĪńĖł”¢°ģŹĀ“¦±é²¼Č«¹ś£¬ĪŖæĶ»§Ģį¹©**Ö±½ÓµÄ·žĪń”£
Å·Ä·ĮśŅŌĘäĢŲÓŠµÄ"“«øŠÓėæŲÖĘ"¼¼Źõ£¬ĄūÓĆĪŅĆĒ¶ąÄźµÄ¾Ń飬ŅŌ¼°¶ŌÉś²śĻÖ³”µÄÉīæĢĄķ½ā£¬²»¶ĻĀś×ćæĶ»§¶Ō²śĘ·¶ąŃł»ÆŗĶøßĘ·ÖŹµÄ×·Ē󔣲»½öČē“Ė£¬Å·Ä·ĮśøüŌŚ»·¾³±£»¤”¢Éś²ś°²Č«·½ĆęĪŖÄś³öı»®²ß”£
“«øŠĘ÷£ØÓ¢ĪÄĆū³Ę£ŗtransducer/sensor£©ŹĒŅ»ÖÖ¼ģ²ā×°ÖĆ£¬ÄÜøŠŹÜµ½±»²āĮæµÄŠÅĻ¢£¬²¢Äܽ«¼ģ²āøŠŹÜµ½µÄŠÅĻ¢£¬°“Ņ»¶Ø¹ęĀɱ任³ÉĪŖµēŠÅŗÅ»ņĘäĖūĖłŠčŠĪŹ½µÄŠÅĻ¢Źä³ö£¬ŅŌĀś×ćŠÅĻ¢µÄ“«Źä”¢“¦Ąķ”¢“ę“¢”¢ĻŌŹ¾”¢¼ĒĀ¼ŗĶæŲÖʵČŅŖĒó”£ĖüŹĒŹµĻÖ×Ō¶Æ¼ģ²āŗĶ×Ō¶ÆæŲÖʵď×ŅŖ»·½Ś”£

“«øŠĘ÷µÄ×é³ÉŗĶ·ÖĄą
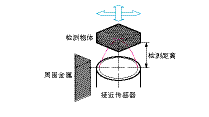
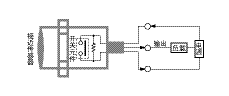
1£®“«øŠĘ÷µÄ×é³É“«øŠĘ÷µÄÖÖĄą·±¶ą£¬Ę乤×÷ŌĄķ”¢ŠŌÄÜĢŲµćŗĶÓ¦ÓĆĮģÓņø÷²»ĻąĶ¬£¬ĖłŅŌ½į¹¹”¢×é³É²īŅģŗܓ󔣵«×ܵĥ“Ėµ£¬“«øŠĘ÷Ķس£ÓÉĆōøŠĘ÷¼ž”¢×Ŗ»»Ę÷¼ž¼°²āĮæµēĀ·×é³É£¬ÓŠŹ±»¹¼ÓÉĻµēŌ“µēĀ·£¬ČēĶ¼1-2ĖłŹ¾”£
1)ĆōøŠĘ÷¼žĆōøŠĘ÷¼ž(sensing element)ŹĒÖø“«øŠĘ÷ÖŠÄÜÖ±½ÓøŠŹÜ±»²āĮæµÄ±ä»Æ£¬²¢Źä³öÓė±»²āĮæ³ÉĪŖČ·¶Ø¹ŲĻµµÄijŅ»ĪļĄķĮæµÄĘ÷¼ž”£ĆōøŠĘ÷¼žŹĒ“«øŠĘ÷µÄŗĖŠÄ£¬Ņ²ŹĒŃŠ¾æ”¢Éč¼ĘŗĶÖĘ×÷“«øŠĘ÷µÄ¹Ų¼ü”£ČēĶ¼1-3ĖłŹ¾ŹĒŅ»ÖÖĘųĢåŃ¹Į¦“«øŠĘ÷µÄŹ¾ŅāĶ¼”£Ä¤ŗŠ2µÄĻĀ°ė²æÓėæĒĢå1¹Ģ¶Ø£¬ÉĻ°ė²æĶعżĮ¬øĖÓė“ÅŠ¾4ĻąĮ¬£¬“ÅŠ¾4ÖĆÓŚĮ½øöµēøŠĻßȦ3ÖŠ£¬µēøŠĻßȦ½ÓČĖ²āĮæµēĀ·5”£ÕāĄļĤŗŠ¾ĶŹĒĆōøŠĘ÷¼ž£¬ĘäĶā²æÓė“óĘųŃ¹Į¦ĻąĶØ£¬ÄŚ²æøŠŹÜ±»²āŃ¹Į¦»§”£µ±Ń¹Į¦»§±ä»ÆŹ±£¬ŅżĘšÄ¤ŗŠÉĻ°ė²æŅĘ¶Æ£¬¼“Źä³öĻąÓ¦µÄĪ»ŅĘĮ攣
2)×Ŗ»»Ę÷¼ž×Ŗ»»Ę÷¼ž( transduction element)ŹĒÖø“«øŠĘ÷ÖŠÄܽ«ĆōøŠĘ÷¼žŹä³öµÄĪļĄķĮæ×Ŗ»»³ÉŹŹÓŚ“«Źä»ņ²āĮæµÄµēŠÅŗŵIJæ·Ö”£ŌŚĶ¼1-3ĖłŹ¾½į¹¹ÖŠ£¬×Ŗ»»Ę÷¼žŹĒµēøŠĻßȦ3£¬Ėü°ŃŹäČėµÄĪ»ŅĘĮæ×Ŗ»»³ÉµēøŠµÄ±ä»Æ”£ŠčŅŖÖø³öµÄŹĒ£¬²¢²»ŹĒĖłÓŠµÄ“«”£ øŠĘ÷¶¼ÄÜĆ÷ĻŌµŲĒų·ÖĆōøŠĘ÷¼žŗĶ×Ŗ»»Ę÷¼žĮ½²æ·ÖµÄ£¬ÓŠµÄ“«øŠĘ÷×Ŗ»»Ę÷¼ž²»Ö¹Ņ»øö£¬ŠčŅŖ¾¹żČōøÉ“ĪµÄ×Ŗ»»£¬ÓŠµÄ“«øŠĘ÷ŌņŹĒĮ½ÕßŗĻ¶žĪŖŅ»µÄ”£
3)²āĮæµēĀ·²āĮæµēĀ·(measuring CIRCUIT)ÓÖ³Ę×Ŗ»»µēĀ·»ņŠÅŗÅ“¦ĄķµēĀ·£¬ĖüµÄ×÷ÓĆŹĒ½«×Ŗ»»Ę÷¼žŹä³öµÄµēŠÅŗŽųŠŠ½ųŅ»²½µÄ×Ŗ»»ŗĶ“¦Ąķ£¬Čē·Å“ó”¢ĀĖ²Ø”¢ĻߊŌ»Æ”¢²¹³„µČ£¬ŅŌ»ńµĆøüŗƵÄĘ·ÖŹĢŲŠŌ£¬±ćÓŚŗóŠųµēĀ·ŹµĻÖĻŌŹ¾”¢¼ĒĀ¼”¢“¦Ąķ¼°æŲÖĘµČ¹¦ÄÜ”£²āĮæµēĀ·µÄĄąŠĶŹÓ“«øŠĘ÷µÄ¹¤×÷ŌĄķŗĶ×Ŗ»»Ę÷¼žµÄĄąŠĶ¶ų¶Ø£¬Ņ»°ćÓŠµēĒŵēĀ·”¢ŠÅŗÅ·Å“óµēĀ·”¢×č湱任µēĀ·”¢Õńµ“µēĀ·µČ”£
2£®“«øŠĘ÷µÄ·ÖĄą“«øŠĘ÷ŹĒÖŖŹ¶ĆܼƔ¢¼¼ŹõĆܼƵIJśĘ·£¬ĖüÓėŠķ¶ąŃ§æĘÓŠ¹Ų£¬ĖüµÄÖÖĄąŹ®·Ö·±¶ą”£Ķس££¬Ņ»ÖÖ“«øŠĘ÷æÉŅŌ¼ģ²ā¶ąÖÖ²ĪŹż£¬Ņ»ÖÖ²ĪŹżÓÖæÉŅŌÓƶąÖÖ“«øŠĘ÷²āĮ棬ĖłŅŌ“«øŠĘ÷µÄ·ÖĄą·½·ØŅ²ŗܶą£¬ÖĮ½ńÉŠĪŽĶ³Ņ»¹ę¶Ø”£ĪŖĮĖŗÜŗƵŲÕĘĪÕĖü”¢Ó¦ÓĆĖü£¬ŠčŅŖÓŠŅ»øöæĘѧµÄ·ÖĄą·½·Ø”£ĻĀĆę½«ÄæĒ°¹ć·ŗ²ÉÓƵķ֥ą·½·Ø×÷¼ņµ„½éÉÜ”£
(1)°““«øŠĘ÷µÄ¹¤×÷»śĄķ²»Ķ¬£¬æÉ·ÖĪŖĪļĄķŠĶ“«øŠĘ÷”¢»ÆѧŠĶ“«øŠĘ÷”¢ÉśĪļŹū“«øŠĘ÷µČ”£
ŌŚĪļĄķŠĶ“«øŠĘ÷ÖŠ£¬×÷ĪŖ“«øŠĘ÷¹¤×÷ĪļĄķ»ł“”µÄ»ł±¾¶ØĀÉÓŠ³”µÄ¶ØĀÉ”¢ĪļÖŹ¶ØĀÉ”¢ŹŲŗć¶ØĀÉŗĶĶ³¼Ę¶ØĀɵȔ£
(2)°““«øŠĘ÷µÄ¹¹³ÉŌĄķ²»Ķ¬£¬æÉ·ÖĪŖ½į¹¹ŠĶ“«øŠĘ÷ÓėĪļŠŌŠĶ“«øŠĘ÷Į½“óĄą”£
½į¹¹ŠĶ“«øŠĘ÷ŹĒĄūÓĆĪļĄķѧ֊³”µÄ¶ØĀɹ¹³ÉµÄ£¬°üĄØ¶ÆĮ¦³”µÄŌĖ¶Æ¶ØĀÉ”¢µē“ų”µÄµē“ŶØĀɵȔ£ĪļĄķѧ֊µÄ¶ØĀÉŅ»°ćŹĒŅŌ·½³ĢŹ½øų³öµÄ”£¶ŌÓŚ“«øŠĘ÷Ą“Ėµ£¬ÕāŠ©·½³ĢŹ½Ņ²¾ĶŹĒŠķ¶ą“«øŠĘ÷ŌŚ¹¤×÷Ź±µÄŹżŃ§Ä£ŠĶ”£ÕāĄą“«øŠĘ÷µÄĢŲµćŹĒ“«øŠĘ÷µÄ¹¤×÷ŌĄķŅŌ“«øŠĘ÷ÖŠŌŖ¼žĻą¶ŌĪ»ÖƱä»ÆŅżĘš³”µÄ±ä»ÆĪŖ»ł“”£¬¶ų²»ŹĒŅŌ²ÄĮĻĢŲŠŌ±ä»ÆĪŖ»ł“””£
ĪļŠŌŠĶ“«øŠĘ÷ŹĒĄūÓĆĪļÖŹ¶ØĀɹ¹³ÉµÄ£¬Čē»¢æĖ¶ØĀÉ”¢Å·Ä·¶ØĀɵȔ£ĪļÖŹ¶ØĀÉŹĒ±ķŹ¾ĪļÖŹÄ³ÖÖæĶ¹ŪŠŌÖŹµÄ·ØŌņ”£ÕāÖÖ·ØŌņ£¬“󶹏żŹĒŅŌĪļÖŹ±¾ÉķµÄ³£ŹżŠĪŹ½øų³öµÄ£¬ÕāŠ©³£ŹżµÄ“󊔾ö¶ØĮĖ“«øŠĘ÷µÄÖ÷ŅŖŠŌÄÜ”£Ņņ“Ė£¬ĪļŠŌŠĶ“«øŠĘ÷µÄŠŌÄÜĖę²ÄĮĻµÄ²»Ķ¬¶ųŅģ”£ĄżČē£¬¹āµē¹Ü¾ĶŹĒĪļŠŌŠĶ“«øŠĘ÷£¬ĖüĄūÓĆĮĖĪļÖŹ·ØŌņÖŠµÄĶā¹āµēŠ§Ó¦”£ĻŌČ»£¬ĘäĢŲŠŌÓėĶæø²ŌŚµē¼«ÉĻµÄ²ÄĮĻÓŠ×ÅĆÜĒŠµÄ¹ŲĻµ”£ÓÖČē£¬ĖłÓŠ°ėµ¼Ģå“«øŠĘ÷£¬ŅŌ¼°ĖłÓŠĄūÓĆø÷ÖÖ»·¾³±ä»Æ¶ųŅżĘšµÄ½šŹō”¢°ėµ¼Ģ唢ĢÕ“É”¢ŗĻ½šµČŠŌÄܱä»ÆµÄ“«øŠĘ÷£¬¶¼ŹōÓŚĪļŠŌŠĶ“«øŠĘ÷”£
(3)øł¾Ż“«øŠĘ÷µÄÄÜĮæ×Ŗ»»Ēéæö£¬æÉ·ÖĪŖÄÜĮææŲÖĘŠĶ“«øŠĘ÷ŗĶÄÜĮæ×Ŗ»»ŠĶ“«øŠĘ÷”£ÄÜĮææŲÖĘĖÜ“«øŠĘ÷£¬ŌŚŠÅĻ¢±ä»Æ¹ż³ĢÖŠ£¬ĘäÄÜĮæŠčŅŖĶāµēŌ“¹©øų”£Čēµē×č”¢µēøŠ”¢µēČŻµČµēĀ·²ĪĮæ“«øŠĘ÷¶¼ŹōÓŚÄÜĮææŲÖĘŠĶ“«øŠĘ÷”£»łÓŚÓ¦±äµē×芧Ӧ”¢“Å×芧Ӧ”¢ČČ×芧Ӧ”¢¹āµēŠ§Ó¦”¢»ō¶ūŠ§Ó¦µČµÄ“«øŠĘ÷Ņ²ŹōÓŚ“ĖĄą“«øŠĘ÷”£ÄÜĮæ×Ŗ»»ŠĶ“«øŠĘ÷£¬Ö÷ŅŖÓÉÄÜĮæ±ä»»ŌŖ¼ž¹¹³É£¬Ėü²»ŠčŅŖĶāµēŌ“”£Čē»łÓŚŃ¹µēŠ§Ó¦”¢ČȵēŠ§Ó¦”¢¹āµēŠ§Ó¦µČµÄ“«øŠĘ÷¶¼ŹōÓŚ“ĖĄą“«øŠĘ÷”£
(4)°““«øŠĘ÷µÄĪļĄķŌĄķ²»Ķ¬£¬æÉ·ÖĪŖŅŌĻĀ¼øÖÖ”£
¢Łµē²ĪĮæŹ½“«øŠĘ÷£¬°üĄØµē×čŹ½”¢µēøŠŹ½”¢µēČŻŹ½µČ”£
¢Ś“ŵēŹ½“«øŠĘ÷£¬°üĄØ“ŵēøŠÓ¦Ź½”¢»ō¶ūŹ½”¢“ÅÕ¤Ź½µČ”£
¢ŪŃ¹µēŹ½“«øŠĘ÷”£
¢Ü¹āµēŹ½“«øŠĘ÷£¬°üĄØŅ»°ć¹āµēŹ½”¢¹āÕ¤Ź½”¢¼¤¹āŹ½”¢¹āµēĀėÅĢŹ½”¢¹āµ¼ĻĖĪ¬Ź½”¢ŗģĶāŹ½”¢ÉćĻńŹ½µČ”£
¢ŻĘųµēŹ½“«øŠĘ÷”£
¢ŽČȵēŹ½“«øŠĘ÷”£
¢ß²ØŹ½“«øŠĘ÷£¬°üĄØ³¬Éł²ØŹ½”¢Ī¢²ØŹ½µČ”£
¢ąÉäĻߏ½“«øŠĘ÷”£
¢į°ėµ¼ĢåŹ½“«øŠĘ÷”£
¢āĘäĖūŌĄķµÄ“«øŠĘ÷”£
ÓŠŠ©“«øŠĘ÷µÄ¹¤×÷ŌĄķ¾ßÓŠĮ½ÖÖŅŌÉĻŌĄķµÄø“ŗĻŠĪŹ½£¬Čē²»ÉŁ°ėµ¼ĢåŹ½“«øŠĘ÷£¬Ņ²æÉ擳ɵē²ĪĮæŹ½“«øŠĘ÷”£
(5)°“ÕÕ“«øŠĘ÷µÄÓĆĶ¾²»Ķ¬£¬æÉ·ÖĪŖĪ»ŅĘ“«øŠĘ÷”¢Ń¹Į¦“«øŠĘ÷”¢Õń¶Æ“«øŠĘ÷”¢ĪĀ¶Č“«øŠĘ÷£¬µČµČ”£
ĮķĶā£¬øł¾Ż“«øŠĘ÷Źä³öÄ£ÄāŠÅŗÅ»¹ŹĒŹż×ÖŠÅŗÅ£¬æÉ·ÖĪŖÄ£Äā“«øŠĘ÷ŗĶŹż×Ö“«øŠĘ÷£»øł¾Ż×Ŗ»»¹ż³ĢæÉÄęÓė·ń£¬æÉ·ÖĪŖĖ«Ļņ“«øŠĘ÷ŗĶµ„Ļņ“«øŠĘ÷µČ”£
ŌŚ¹¤³ĢŹµ¼ŹÓ¦ÓĆÖŠĶłĶł°“ÕÕ“«øŠĘ÷µÄÓĆĶ¾Ą“·ÖĄą£¬¶ųŌŚ²ūŹö“«øŠĘ÷µÄŌĄķŹ±Ņ»°ć°“ÕÕ“«øŠĘ÷µÄĪļĄķŌĄķĄ“·ÖĄą”£
Ö÷ŅŖ¹¦ÄÜ
³£½«“«øŠĘ÷µÄ¹¦ÄÜÓėČĖĄą5“óøŠ¾õĘ÷Ļą±ČÄā£ŗ ¹āĆō“«øŠĘ÷”Ŗ”ŖŹÓ¾õ ÉłĆō“«øŠĘ÷”Ŗ”ŖĢż¾õ ĘųĆō“«øŠĘ÷”Ŗ”ŖŠį¾õ»Æѧ“«øŠĘ÷”Ŗ”ŖĪ¶¾õ Ń¹Ćō”¢ĪĀĆō”¢ Į÷Ģå“«øŠĘ÷”Ŗ”Ŗ“„¾õ”” ĆōøŠŌŖ¼žµÄ·ÖĄą£ŗ ĪļĄķĄą£¬»łÓŚĮ¦”¢ČČ”¢¹ā”¢µē”¢“ÅŗĶÉłµČĪļĄķŠ§Ó¦”£ »ÆѧĄą£¬»łÓŚ»Æѧ·“Ó¦µÄŌĄķ”£ ÉśĪļĄą£¬»łÓŚĆø”¢æ¹Ģ唢ŗĶ**µČ·Ö×ÓŹ¶±š¹¦ÄÜ”£ Ķس£¾ŻĘ仳±¾øŠÖŖ¹¦ÄÜæÉ·ÖĪŖČČĆōŌŖ¼ž”¢¹āĆōŌŖ¼ž”¢ĘųĆōŌŖ¼ž”¢Į¦ĆōŌŖ¼ž”¢“ÅĆōŌŖ¼ž”¢ŹŖĆōŌŖ¼ž”¢ÉłĆōŌŖ¼ž”¢·ÅÉäĻßĆōøŠŌŖ¼ž”¢É«ĆōŌŖ¼žŗĶĪ¶ĆōŌŖ¼žµČ**Ąą£Ø»¹ÓŠČĖŌų½«ĆōøŠŌŖ¼ž·Ö46Ąą£©”£ Ö÷ŅŖĢŲµć “«øŠĘ÷µÄĢŲµć°üĄØ£ŗĪ¢ŠĶ»Æ”¢Źż×ֻƔ¢ÖĒÄܻƔ¢¶ą¹¦ÄܻƔ¢ĻµĶ³»Æ”¢ĶųĀē»Æ£¬Ėü²»½ö“Ł½ųĮĖ“«Ķ³²śŅµµÄøÄŌģŗĶøüŠĀ»»“ś£¬¶ųĒŅ»¹æÉÄܽØĮ¢ŠĀŠĶ¹¤Ņµ£¬“Ó¶ų³ÉĪŖ21ŹĄ¼ĶŠĀµÄ¾¼ĆŌö³¤µć”£Ī¢ŠĶ»ÆŹĒ½ØĮ¢ŌŚĪ¢µē×Ó»śŠµĻµĶ³£ØMEMS£©¼¼Źõ»ł“”ÉĻµÄ£¬ÄæĒ°ŅŃ³É¹¦Ó¦ÓĆŌŚ¹čĘ÷¼žÉĻ×ö³É¹čŃ¹Į¦“«øŠĘ÷”£

|
”ø¹āµē“«øŠĘ÷”¹ŹĒĄūÓĆ¹āµÄø÷ÖÖŠŌÖŹ£¬¼ģ²āĪļĢåµÄÓŠĪŽŗĶ±ķĆęדĢ¬µÄ±ä»ÆµČµÄ“«øŠĘ÷”£¹āµē“«øŠĘ÷Ö÷ŅŖÓÉ·¢¹āµÄĶ¶¹ā²æŗĶ½ÓŹÜ¹āĻßµÄŹÜ¹ā²æ¹¹³É”£Čē¹ūĶ¶ÉäµÄ¹āĻßŅņ¼ģ²āĪļĢå²»Ķ¬¶ų±»ÕŚŃŚ»ņ·“É䣬µ½“ļŹÜ¹ā²æµÄĮ潫»į·¢Éś±ä»Æ”£ŹÜ¹ā²æ½«¼ģ²ā³öÕāÖÖ±ä»Æ£¬²¢×Ŗ»»ĪŖµēĘųŠÅŗÅ£¬½ųŠŠŹä³ö”£“󶹏¹ÓĆæÉŹÓ¹ā£ØÖ÷ŅŖĪŖŗģÉ«£¬Ņ²ÓĆĀĢÉ«”¢Ą¶É«Ą“ÅŠ¶ĻŃÕÉ«£©ŗĶŗģĶā¹ā”£ ¹āµē“«øŠĘ÷ČēĻĀĶ¼ĖłŹ¾Ö÷ŅŖ·ÖĪŖ3Ąą”££ØĻźĻøÄŚČŻĒė²Ī¼ū”ø ·ÖĄą ”¹£© |
|
¶ŌÉäŠĶ
|
»Ų¹é·“ÉäŠĶ
|
Ą©É¢·“ÉäŠĶ
|
|
|
|
¹āµē“«øŠĘ÷ĢŲ³¤
|
¢Ł¼ģ²ā¾ąĄė³¤ |
|
Čē¹ūŌŚ¶ŌÉäŠĶÖŠ±£Įō10mŅŌÉĻµÄ¼ģ²ā¾ąĄėµČ£¬±ćÄÜŹµĻÖĘäĖū¼ģ²āŹÖ¶Ī£Ø“ÅŠŌ”¢³¬Éł²ØµČ£© ĪŽ·ØĄė¼ģ²ā”£“ļµ½µÄ³¤¾ą |
|
¢Ś¶Ō¼ģ²āĪļĢåµÄĻŽÖĘÉŁ |
|
ÓÉÓŚŅŌ¼ģ²āĪļĢåŅżĘšµÄÕŚ¹āŗĶ·“ÉäĪŖ¼ģ²āŌĄķ£¬ĖłŅŌ²»Ļó½Ó½ü“«øŠĘ÷µČ½«¼ģ²āĪļĢåĻŽ¶Ø ŌŚ½šŹō£¬ĖüæɶŌ²£Į§.ĖÜĮĻ.ľ²Ä.ŅŗĢåµČ¼øŗõĖłÓŠĪļĢå½ųŠŠ¼ģ²ā”£ |
|
¢ŪĻģÓ¦Ź±¼ä¶Ģ |
|
¹ā±¾ÉķĪŖøßĖŁ£¬²¢ĒŅ“«øŠĘ÷µÄµēĀ·¶¼Óɵē×ÓĮć¼ž¹¹³É£¬ĖłŅŌ²»°üŗ¬»śŠµŠŌ¹¤×÷Ź±¼ä£¬ĻģÓ¦Ź±¼ä·Ē³£¶Ģ”£ |
|
¢Ü·Ö±ęĀŹøß |
|
ÄÜĶعżøß¼¶Éč¼Ę¼¼ŹõŹ¹Ķ¶¹ā¹āŹų¼ÆÖŠŌŚŠ”¹āµć£¬»ņĶعż¹¹³ÉĢŲŹāµÄŹÜ¹ā¹āѧĻµĶ³£¬Ą“ŹµĻÖøß·Ö±ęĀŹ”£Ņ²æɽųŠŠĪ¢Š”ĪļĢåµÄ¼ģ²āŗĶøß¾«¶ČµÄĪ»ÖĆ¼ģ²ā”£ |
|
¢ŻæÉŹµĻÖ·Ē½Ó“„µÄ¼ģ²ā |
|
æÉŅŌĪŽŠė»śŠµŠŌµŲ½Ó“„¼ģ²āĪļĢåŹµĻÖ¼ģ²ā£¬Ņņ“Ė²»»į¶Ō¼ģ²āĪļĢåŗĶ“«øŠĘ÷Ōģ³ÉĖšÉĖ”£Ņņ“Ė£¬“«øŠĘ÷Äܳ¤ĘŚŹ¹ÓĆ”£ |
|
¢ŽæÉŹµĻÖŃÕÉ«ÅŠ±š |
|
Ķعż¼ģ²āĪļĢåŠĪ³ÉµÄ¹āµÄ·“ÉäĀŹŗĶĪüŹÕĀŹøł¾Ż±»Ķ¶¹āµÄ¹āĻ߲س¤ŗĶ¼ģ²āĪļĢåµÄŃÕÉ«×éŗĻ¶ųÓŠĖł²īŅģ”£ĄūÓĆÕāÖÖŠŌÖŹ£¬æɶŌ¼ģ²āĪļĢåµÄŃÕÉ«½ųŠŠ¼ģ²ā”£ |
|
¢ß±ćÓŚµ÷Õū |
|
ŌŚĶ¶ÉäæÉŹÓ¹āµÄĄąŠĶÖŠ£¬Ķ¶¹ā¹āŹųŹĒŃŪ¾¦æɼūµÄ£¬±ćÓŚ¶Ō¼ģ²āĪļĢåµÄĪ»ÖĆ½ųŠŠµ÷Õū”£ |
¹āµē“«øŠĘ÷ŌĄķ
¢Ł¹āµÄŠŌÖŹ
Ö±Éä
¹āŌŚæÕĘųÖŠŗĶĖ®ÖŠŹ±£¬×ÜŹĒÖ±Ļß“«²„”£
Ź¹ÓƶŌÉäŠĶ“«øŠĘ÷ĶāÖƵÄæŖ²ęĄ“¼ģ²āĪ¢Š”ĪļĢåµÄŹ¾Ąż±ćŹĒŌĖÓĆĮĖÕāÖÖŌĄķ”£
![]()
ĒśÕŪ ŹĒÖø¹āÉäČėµ½ĒśÕŪĀŹ²»Ķ¬µÄ½ēĆęÉĻŹ±£¬ĶعżøĆ½ēĆęŗó£¬øı䊊½ų·½ĻņµÄĻÖĻó”£
·“Éä£ØÕż·“É䔢»Ų¹é·“É䔢Ą©É¢·“É䣩 ŌŚ¾µĆęŗĶ²£Į§Ę½ĆęÉĻ£¬¹ā»įŅŌÓėČėÉä½ĒĻąĶ¬µÄ½Ē¶Č·“É䣬³ĘĪŖÕż·“É䔣 3øöĘ½Ć껄ĻąÖ±½Ē°ć×éŗĻµÄŠĪד³ĘĪŖČżĆęÖ±½ĒĄā¾µ”£ Čē¹ūĆęĻņČżĆęÖ±½ĒĄā¾µĶ¶¹ā£¬½«·“ø“½ųŠŠÕż·“É䣬**Öյķ“Éä¹ā½«ĻņĶ¶¹āµÄ·“·½ĻņŠŠ½ų”£
ÕāŃłµÄ·“Éä³ĘĪŖ»Ų¹é·“É䔣 ¶ąŹżµÄ»Ų¹é·“Éä°å¶¼ŹĒÓÉŹżmm½ĒµÄČżĆęÖ±½ĒĄā¾µ°“¹ęĀÉÅÅĮŠ¶ų¹¹³ÉµÄ”£ “ĖĶā£¬ŌŚ°×Ö½µČƻӊ¹āŌóŠŌµÄ±ķĆęÉĻ£¬¹āĻß½«Ļņø÷øö·½Ļņ·“É䣬ÕāŃłµÄ·“Éä³ĘĪŖĄ©É¢·“É䔣 Ą©É¢·“ÉäŠĶ½«øĆŌĄķ×÷ĪŖ¼ģ²ā·½Ź½”£
Ę«¹ā ¹āĻßæÉŅŌ±ķĻÖĪŖÓėĘ䊊½ų·½Ļņ“¹Ö±µÄÕń¶Æ²Ø”£×÷ĪŖ¹āµē“«øŠĘ÷µÄ¹āŌ“£¬Ö÷ŅŖŹ¹ÓĆLED”£“Ó LEDĶ¶ÉäµÄ¹āĻߣ¬»įŌŚÓėŠŠ½ų·½Ļņ“¹Ö±µÄø÷øö·½ĻņÉĻÕń¶Æ£¬ÕāÖÖדĢ¬µÄ¹ā³ĘĪŖĪŽĘ«¹ā”£½«ĪŽĘ« ¹āµÄ¹āµÄÕń¶Æ·½ĻņĻŽÖĘŌŚŅ»øö·½ĻņÉĻµÄ¹āѧ¹żĀĖĘ÷³ĘĪŖĘ«¹ā¹żĀĖĘ÷”£¼““ÓLEDĶ¶¹ā£¬²¢ĶعżĘ« ¹ā¹żĀĖĘ÷µÄ¹āĻßÖ»ŌŚŅ»øö·½ĻņÉĻÕń¶Æ£¬ÕāÖÖדĢ¬³ĘĪŖĘ«¹ā£ØÕżČ·µŲĖµÓ¦ĪŖÖ±ĻßĘ«¹ā£©”£ŌŚÄ³ Ņ»·½Ļņ£ØĄżČēׯ·½Ļņ£©ÉĻÕń¶ÆµÄĘ«¹ā£¬ĪŽ·ØĶعżĻŽÖĘŌŚĘ䓹ֱ·½Ļņ£Øŗį·½Ļņ£©ÉĻÕń¶ÆµÄĘ«¹ā ¹żĀĖĘ÷”£»Ų¹é·“ÉäŠĶµÄM.S.R¹¦Äܣؔś¢ŪM.S.R.¹¦ÄÜ£ØMirror Surface Rejection£ŗ¾µĆęĢå¹āŌó Ēå³ż£©Ņ³£©ŗĶ×÷ĪŖ¶ŌÉäŠĶÅ伞µÄ·ĄÖ¹Ļą»„øÉČŹżĀĖĘ÷¾ĶŹĒÓ¦ÓĆĮĖÕāÖÖŌĄķ”£
¢Ś¹āŌ“ ¹āµÄµćĮĮ·½Ź½ ”“Āö³å±äµ÷¹ā”µ ¶ąŹż¹āµē“«øŠĘ÷²ÉÓĆĀö³å±äµ÷¹ā£¬»ł±¾ŅŌŅ»¶ØÖÜĘŚ·“ø“Ķ¶¹ā”£ ÓÉÓŚŗÜČŻŅ×ÅųżŌÓĀŅ¹āµÄÓ°Ļģ£¬ĖłŅŌæÉŅŌŹµĻÖ³¤¾ąĄė¼ģ²ā”£ŌŚ“ų·ĄÖ¹Ļą»„øÉČŹ¦ÄܵĥąŠĶÖŠ £¬Ķ¶¹āµÄÖÜĘŚ»įøł¾ŻøÉČŹāŗĶŌÓĀŅ¹ā¶ųŌŚŅ»¶Ø·¶Ī§ÄŚ±ä»Æ”£
”“Ö±Į÷¹ā”µ ŹĒĮ¬ŠųĶ¶ÉäŅ»¶Ø¹āĮæµÄ¹āĻߣ¬ŌŚ±ź¼Ē“«øŠĘ÷µČ²æ·Ö»śŠĶÖŠŹ¹ÓĆ”£ÄܵƵ½øßĖŁĻģÓ¦ŠŌ£¬µ«ÓŠ¼ģ ²ā¾ąĄė¶Ģ£¬ČŻŅ׏ÜŌÓĀŅ¹āÓ°ĻģµČȱµć”£ 
¹āŌ“É«ÓėÖÖĄą
¢Ū¹āĻĖŠĶ ¹¹Ōģ ÓÉÓŚ¼ģ²ā²æ£Ø¹āĻĖ£©ÖŠĶźČ«Ć»ÓŠµēĘų²æ·Ö£¬ĖłŅŌÄĶøÉČŵČÄĶ»·¾³ŠŌĮ¼ŗĆ”£

E3X-DA-S£ØŹż×Ö·Å“óĘ÷£©
¼ģ²āŌĄķ ¹āĻĖÓÉÖŠ¼äµÄŗĖŠÄŗĶĶāĪ§²æ·ÖĒśÕŪĀŹ½ĻŠ”µÄĶā°ü½šŹō¹¹³É”£ Čē¹ū¹āĻßČėÉäµ½ŗĖŠÄ²æ·Ö£¬¹āĻß½«»įŌŚÓėĶā°ü½šŹōµÄ½»½ēĆęÉĻŅ»±ß·“ø“½ųŠŠČ«·“É䣬Ņ»±ßŠŠ½ų”£Ķعż¹āĻĖ ÄŚ²æ“Ó¶ĖĆę·¢³öµÄ¹āĻßŅŌŌ¼60”ćµÄ½Ē¶ČĄ©É¢£¬ÕÕÉäµ½¼ģ²āĪļĢåÉĻ”£
¹āĻĖµÄÖÖĄąÓėĢŲŠŌ
| ½ŲĆę | ¹¹Ōģ | ĢŲ³¤ | ÓŠŠ§ÓĆĶ¾ | “ś±ķŠĶŗÅ |
|
ČįČķŠĶ (¶ąŗĖŠÄ) |
(ÖŠ¼äµÄĖŲĻß¹Ģ¶Ø) |
ŗÜÉŁŅņĶäĒśŌģ³É¹āĮæ±ä¶Æ ČŻŠķĶäĒś°ė¾¶£ŗR1mm |
Óė“«Ķ³µÄ±ź×¼ŠĶĻą±Č ČįČķ£¬æÉĻńµēĻß°ć²¼Ļß ĶäĒś°ė¾¶æÉŗöĀŌ ¼“Ź¹Åö“„µ½¹āĻĖ£¬¹āĮæŅ²²»±ä¶Æ |
E32-T11R E32-T11R |
|
±ź×¼ŠĶ µ„Š¾ |
|
¹āµÄ“«ŹäŠ§¹ūŗĆ (¼ģ²ā¾ąĄė½Ļ³¤) ČŻŠķĶäĒś°ė¾¶ £ŗ R25mm»ņR10mm |
E32-TC200 E32-DC200 |
|
|
ÄĶĶäĒśŠĶ(Źų) |
£ØÖŠ¼äµÄĖŲĻß·ÖÉ¢£© |
ÄĶĒśÕŪŠŌĮ¼ŗĆ ·“ø“ĶäĒś“ĪŹż100Ķņ“ĪŅŌÉĻ£Ø“ś±ķĄż£© ČŻŠķĶäĒś°ė¾¶£ŗR4mm |
¼“Ź¹Ź¹ÓĆ»śĘ÷ČĖŹÖ±ŪµČæɶƵIJæ·ÖŅ²ŗÜÄŃĘĘĖš |
E32-T11 E32-D11 |
¢ÜČż½Ē²ā¾ą ¾ąĄėÉč¶ØŠĶ¹āµē“«øŠĘ÷Ö÷ŅŖŅŌČż½Ē²ā¾ąĪŖ¼ģ²āŌĄķ”£ĻĀĶ¼ĖłŹ¾µÄŹĒČż½Ē²ā¾ąµÄŌĄķ”£“ÓĶ¶¹āŌŖ¼žĶ¶ÉäµÄ¹āĻß½«ŌŚ¼ģ²āĪļĢåÉĻĄ©É¢·“É䔣·“Éä¹ā½«ĶعżŹÜ¹āĶø¾µŌŚĪ»ÖĆ¼ģ²āŌŖ¼ž£ØŹä³ö·ūŗĻ¹āĻßĪ»ÖĆŠÅŗŵİėµ¼ĢåŌŖ¼ž£©ÉĻ³ÉĻń”£¼ģ²āĪļĢåŌŚææ½ü¹āѧĻµĶ³µÄĪ»ÖĆAµÄĒéæöĻĀ£¬·“Éä¹ā»įŌŚĪ»ÖĆ¼ģ²āŌŖ¼žµÄaĪ»ÖĆÉĻ³ÉĻń”£ŌŚĄė¹āѧĻµĶ³½ĻŌ¶µÄĪ»ÖĆBµÄĒéæöĻĀ£¬·“Éä¹ā½«ŌŚbĪ»ÖĆÉĻ³ÉĻń”£Ņņ“Ė£¬Ķعż²ā¶ØĪ»ÖĆ¼ģ²āŌŖ¼žÉĻµÄ³ÉĻńĪ»ÖĆ£¬æÉŅŌ¼ģ²āÓė¼ģ²āĪļĢåµÄ¾ąĄė”£

¹āµē“«øŠĘ÷·ÖĄą
¢Ł°“¼ģ²ā·½Ź½·ÖĄą
(1)¶ŌÉäŠĶ ¼ģ²ā·½Ź½ ĪŖĮĖŹ¹Ķ¶¹āĘ÷·¢³öµÄ¹āÄܽųČėŹÜ¹āĘ÷£¬¶ŌĻņÉčÖĆĶ¶¹āĘ÷ÓėŹÜ¹āĘ÷”£ Čē¹ū¼ģ²āĪļĢå½ųČėĶ¶¹āĘ÷ŗĶŹÜ¹āĘ÷Ö®¼äÕŚ±ĪĮĖ¹āĻߣ¬½ųČėŹÜ¹āĘ÷µÄ¹āĮ潫¼õÉŁ”£ ÕĘĪÕÕāÖÖ¼õÉŁŗó±ćæɽųŠŠ¼ģ²ā”£
“ĖĶā£¬¼ģ²ā·½Ź½Óė¶ŌÉäŠĶĻąĶ¬£¬ŌŚ“«øŠĘ÷ŠĪד·½Ćę£¬Ņ²ÓŠĶ¶¹āŹÜ¹ā²æŅ»Ģå»Æ£¬³ĘĪŖ²ŪŠĪµÄÖÖĄą”£
ĢŲ³¤£ŗ ¶Æ×÷µÄĪČ¶Ø¶Čøߣ¬¼ģ²ā¾ąĄė³¤”££ØŹżcm”«ŹżŹ®m£© ¼“Ź¹¼ģ²āĪļĢåµÄĶعżĻßĀ·±ä»Æ£¬¼ģ²āĪ»ÖĆŅ²²»±ä”£ ¼ģ²āĪļĢåµÄ¹āŌó?ŃÕÉ«?Ē抱µČµÄÓ°ĻģŗÜÉŁ”£
(2)Ą©É¢·“ÉäŠĶ ¼ģ²ā·½Ź½ ŌŚĶ¶ŹÜ¹āĘ÷Ņ»ĢåŠĶÖŠ£¬Ķس£¹āĻß²»»į·µ»ŲŹÜ¹ā²æ”£Čē¹ūĶ¶¹ā²æ·¢³öµÄ¹āĻßÅöµ½¼ģ²āĪļĢ壬¼ģ ²āĪļĢå·“ÉäµÄ¹āĻß½«½ųČėŹÜ¹ā²æ£¬ŹÜ¹āĮ潫Ōö¼Ó”£ÕĘĪÕÕāÖÖŌö¼Óŗ󣬱ćæɽųŠŠ¼ģ²ā”£
ĢŲ³¤£ŗ ¼ģ²ā¾ąĄėĪŖŹżcm”«Źżm”£ ±ćÓŚ°²×°µ÷Õū”£ ŌŚ¼ģ²āĪļĢåµÄ±ķĆęדĢ¬£ØŃÕÉ«”¢°¼Ķ¹£©ÖŠ¹āµÄ·“Éä¹āĮæ»į±ä»Æ£¬¼ģ²āĪČ¶ØŠŌŅ²±ä»Æ”£
(3)»Ų¹é·“ÉäŠĶ ¼ģ²ā·½Ź½ ŌŚĶ¶ŹÜ¹āĘ÷Ņ»ĢåŠĶÖŠ£¬Ķس£Ķ¶¹ā²æ·¢³öµÄ¹āĻß½«·“Éäµ½Ļą¶ŌÉčÖƵķ“Éä°åÉĻ£¬»Ųµ½ŹÜ¹ā²æ”£ Čē¹ū¼ģ²āĪļĢåÕŚ±Ī¹āĻߣ¬½ųČėŹÜ¹ā²æµÄ¹āĮ潫¼õÉŁ”£ ÕĘĪÕÕāÖÖ¼õÉŁŗ󣬱ćæɽųŠŠ¼ģ²ā”£
ĢŲ³¤ ¼ģ²ā¾ąĄėĪŖŹżcm”«Źżm”£ ²¼Ļß.¹āÖįµ÷Õū·½±ć£ØæɽŚŹ”¹¤Ź±£©”£ ¼ģ²āĪļĢåµÄŃÕÉ«”¢Ē抱µČµÄÓ°ĻģŗÜÉŁ”£ ¹āĻßĶعż¼ģ²āĪļĢå2“Ī£¬ĖłŅŌŹŹŗĻĶøĆ÷ĢåµÄ¼ģ²ā”£ ¼ģ²āĪļĢåµÄ±ķĆęĪŖ¾µĆęĢåµÄĒéæöĻĀ£¬øł¾Ż±ķĆę·“Éä¹āµÄŹÜ¹ā²»Ķ¬£¬ÓŠŹ±»įÓėĪŽ¼ģ²āĪļĢåµÄד Ģ¬ĻąĶ¬£¬ĪŽ·Ø¼ģ²ā”£ÕāÖÖÓ°ĻģæÉĶعżMSR¹¦ÄÜĄ“·ĄÖ¹”£
(4)¾ąĄėÉč¶ØŠĶ ¼ģ²ā·½Ź½ ×÷ĪŖ“«øŠĘ÷µÄŹÜ¹āŌŖ¼ž£¬Ź¹ÓĆ2±ČĄż¹āµē¶ž¼«¹Ü»ņĪ»ÖĆ¼ģ²āŌŖ¼ž”£Ķعż¼ģ²āĪļĢå·“ÉäµÄĶ¶ ¹ā¹āŹų½«ŌŚŹÜ¹āŌŖ¼žÉĻ³ÉĻń”£ÕāŅ»³ÉĻńĪ»ÖĆŅŌøł¾Ż¼ģ²āĪļĢå¾ąĄė²»Ķ¬¶ų²īŅģµÄČż½Ē²ā¾ąŌĄķ ĪŖ¼ģ ²āŌĄķ”£ ĻĀĶ¼ĖłŹ¾µÄŹĒŹ¹ÓĆ2±ČĄż¹āµē¶ž¼«¹ÜµÄ¼ģ²ā·½Ź½”£2±ČĄż¹āµē¶ž¼«¹ÜµÄŅ»¶Ė£Ø½Ó½üĶāæĒµÄ Ņ»²ą£©³ĘĪŖN£ØNear£©²ą£¬¶ųĮķŅ»¶Ė³ĘĪŖF£ØFar£©²ą”£¼ģ²āĪļĢå“ęŌŚÓŚŅŃÉč¶Ø¾ąĄėµÄĪ»ÖĆÉĻ µÄĒéæöĻĀ£¬·“Éä¹ā½«ŌŚN²ąŗĶF²ąµÄÖŠ¼äµć³ÉĻń£¬Į½²ąµÄ¶ž¼«¹Ü½«ŹÜµ½Ķ¬µČµÄ¹āĮ攣“ĖĶā£¬Ļą ¶ŌÓŚÉč¶Ø¾ąĄė£¬¼ģ²āĪļĢå“ęŌŚÓŚææ½ü“«øŠĘ÷µÄĪ»ÖƵÄĒéæöĻĀ£¬·“Éä¹ā½«ŌŚN²ą³ÉĻń”£Ļą·“µÄ£¬ Ļą¶ŌÓŚÉč¶Ø¾ąĄė£¬¼ģ²āĪļĢå“ęŌŚÓŚ½ĻŌ¶µÄĪ»ÖƵÄĒéæöĻĀ£¬·“Éä¹ā½«ŌŚF²ą³ÉĻń”£“«øŠĘ÷æÉĶعż ¼ĘĖćN²ąÓėF²ąµÄŹÜ¹āĮæ²īĄ“ÅŠ¶Ļ¼ģ²āĪļĢåµÄĪ»ÖĆ”£ 
¾ąĄėÉč¶ØŠĶµÄĢŲ³¤ ŹÜ¼ģ²āĪļĢåµÄ±ķĆęדĢ¬?ŃÕÉ«µÄÓ°ĻģÉŁ”£ ²»Ņ׏ܱ³¾°ĪļĢåµÄÓ°Ļģ”£ BGS(Background Suppression)ŗĶFGS(Foreground Suppression) ŌŚE3Z-LS61/-66/-81/-86ÖŠ£¬¼ģ²ā“«Źä“ųÉĻĪļĢåµÄĒéæöĻĀ£¬æÉŃ”ŌńBGSŗĶFGSĮ½ÖÖ¹¦ÄÜÖŠµÄČĪ ŗĪŅ»øö”£ BGSŹĒ²»»į¶Ō±ČÉč¶Ø¾ąĄėøüŌ¶µÄ±³¾°£Ø“«Źä“ų£©½ųŠŠ¼ģ²āµÄ¹¦ÄÜ”£ FGŹĒ²»»į¶Ō±ČÉč¶Ø¾ąĄėøü½üµÄĪļĢ壬ŅŌ¼°»Ųµ½ŹÜ¹āĘ÷µÄ¹āĮæÉŁÓŚ¹ę¶ØµÄĪļĢå½ųŠŠ¼ģ²āµÄ¹¦ÄÜ£¬·“ŃŌÖ®£¬ŹĒÖ»¶Ō“«Źä“ų½ųŠŠ¼ģ²āµÄ¹¦ÄÜ”£
»Ųµ½ŹÜ¹āĘ÷¹āĮæÉŁµÄĪļĢåŹĒÖø£ŗ ¢Ł¼ģ²āĪļĢåµÄ·“ÉäĀŹ¼«µĶ£¬±ČŗŚ»Ö½øüŗŚµÄĪļĢ唣 ¢Ś·“Éä¹ā¼øŗõ¶¼»Ųµ½Ķ¶¹ā²ą£¬Čē¾µ×ÓµČĪļĢ唣 ¢Ū·“Éä¹āĮæ“󣬵«ĻņĖ껜·½Ļņ·¢É¢£¬ÓŠ°¼Ķ¹µÄ¹āŌóĆęµČĪļĢ唣 ×¢£ŗ¢ŪµÄĒéæöĻĀ£¬øł¾Ż¼ģ²āĪļĢåµÄŅĘ¶Æ£¬ÓŠŹ±·“Éä¹ā»įŌŻŹ±»Ųµ½ŹÜ¹ā²ą£¬ĖłŅŌÓŠŹ±ŠčŅŖĶعżOFFŃÓ³Ł¶ØŹ±Ę÷Ą“·ĄÖ¹øßĖŁ²ü¶Æ”£
ĢŲ³¤ æɶŌĪ¢Š”µÄ¶Ī²ī½ųŠŠ¼ģ²ā£ØBGS”¢FGS£©”£ ²»Ņ×ŹÜ¼ģ²āĪļĢåµÄŃÕÉ«Ó°Ļģ£ØBGS”¢FGS£©”£ ²»Ņ׏ܱ³¾°ĪļĢåµÄÓ°Ļģ£ØBGS£©”£ ÓŠŹ±»įŹÜ¼ģ²āĪļĢåµÄ°ßµćÓ°Ļģ£ØBGS”¢FGS£©”£
(5)ĻŽ¶Ø·“ÉäŠĶ ¼ģ²ā·½Ź½ ÓėĄ©É¢·“ÉäŠĶĻąĶ¬£¬½ÓŹÜ“Ó¼ģ²āĪļĢå·¢³öµÄ·“Éä¹ā½ųŠŠ¼ģ²ā”£ÉčÖĆĪŖŌŚĶ¶¹āĘ÷ŗĶŹÜ¹āĘ÷ÉĻ½öČėÉä Õż·“Éä¹ā£¬½ö¶ŌĄėæŖ“«øŠĘ÷Ņ»¶Ø¾ąĄė£ØĶ¶¹ā¹āŹųÓėŹÜ¹āĒųÓņÖŲµžµÄ·¶Ī§£©µÄ¼ģ²āĪļĢå½ųŠŠ¼ģ²ā”£ ĻĀĶ¼ÖŠ£¬æÉŌŚ£ØA£©Ī»ÖĆ¼ģ²āĪļĢ壬µ«ŌŚ£ØB£©Ī»ÖĆĪŽ·Ø¼ģ²ā”£
ĢŲ³¤ æɼģ²āĪ¢ĆīµÄ¶Ī²ī”£ ĻŽ¶ØÓė“«øŠĘ÷µÄ¾ąĄė£¬Ö»ŌŚøĆ·¶Ī§ÄŚÓŠ¼ģ²āĪļĢåŹ±½ųŠŠ¼ģ²ā”£ ²»Ņ×ŹÜ¼ģ²āĪļĢåµÄŃÕÉ«µÄÓ°Ļģ”£ ²»Ņ×ŹÜ¼ģ²āĪļĢåµÄ¹āŌó”¢Ē抱µÄÓ°Ļģ”£
¢Ś°“¼ģ²ā·½Ź½Ń”Ōńµć
¶ŌÉäŠĶ/»Ų¹é·“ÉäŠĶµÄČ·ČĻŹĀĻī ¼ģ²āĪļĢå 1£®“óŠ””¢ŠĪד£Øׯ”Įŗį”Įøߣ© 2£®ĶøĆ÷¶Č£Ø²»ĶøĆ÷Ģå|°ėĶøĆ÷Ģå|ĶøĆ÷Ģ壩 3£®ŅʶÆĖŁ¶ČV£Øm/s»ņøö/·Ö£© “«øŠĘ÷ 1£®¼ģ²ā¾ąĄė£ØL£© 2£®ŠĪד?“󊔵ÄĻŽÖĘ a£©“«øŠĘ÷ b£©»Ų¹é·“Éä°å£Ø»Ų¹é·“ÉäŠĶµÄĒéæöĻĀ£© 3£®ÓŠĪŽ¶ąøö½ōĆÜ°²×° a£©ĢØŹż b£©°²×°¼ä¾ą c£©ŹĒ·ńæÉŅŌ½»“ķ°²×° 4£®°²×°µÄĻŽÖĘ£ØŹĒ·ńŠčŅŖ½Ē¶ČµČ£© »·¾³ 1£®»·¾³ĪĀ¶Č 2£®ÓŠĪŽĖ®”¢ÓĶ”¢Ņ©Ę·µČ·ÉÉ¢ 3£®ĘäĖū
Ą©É¢·“ÉäŠĶ”¢¾ąĄėÉč¶ØŠĶ”¢ĻŽ¶Ø·“ÉäŠĶµÄČ·ČĻŹĀĻī ¼ģ²āĪļĢå 1£®“󊔊Īד£Øׯ”Įŗį”Įøߣ© 2£®ŃÕÉ« 3£®²ÄĮĻ£ØĢś”¢SUS”¢Ä¾”¢Ö½µČ£© 4£®±ķĆęדĢ¬£Ø“Ö²Ś”¢ÓŠ¹āŌó£© 5£®ŅʶÆĖŁ¶ČV£Øm/s»ņøö/·Ö£©
“«øŠĘ÷ 1£®¼ģ²ā¾ąĄė£ØÓė¹¤¼žÖ®¼äµÄ¾ąĄė£©£ØL£© 2£®ŠĪד”¢“󊔵ÄĻŽÖĘ 3£®ÓŠĪŽ¶ąøö½ōĆÜ°²×° a£©ĢØŹż b£©°²×°¼ä¾ą 4£®°²×°µÄĻŽÖĘ£ØŹĒ·ńŠčŅŖ½Ē¶ČµČ£©
±³¾° 1£®ŃÕÉ« 2£®²ÄĮĻ£ØĢś”¢SUS”¢Ä¾”¢Ö½µČ£© 3£®±ķĆęדĢ¬£Ø“Ö²Ś”¢ÓŠ¹āŌóµČ£©
»·¾³ 1£®»·¾³ĪĀ¶Č 2£®ÓŠĪŽĖ®”¢ÓĶ”¢Ņ©Ę·µČ·ÉÉ¢ 3£®ĘäĖū
¢Ū°“¹¹³É·ÖĄą ¹āµē“«øŠĘ÷Ķس£ÓÉĶ¶¹ā²æ”¢ŹÜ¹ā²æ”¢Ōö·ł²æ”¢æŲÖĘ²æ”¢µēŌ“²æ¹¹³É£¬°“Ęä¹¹³ÉדĢ¬æÉ·ÖĪŖŅŌĻĀ¼øĄą”£ (1)·Å“óĘ÷·ÖĄėŠĶ ½öĶ¶¹ā²æŗĶŹÜ¹ā²æ·ÖĄė£¬·Ö±š×÷ĪŖĶ¶¹ā²æŗĶŹÜ¹ā²æ£Ø¶ŌÉäŠĶ£©”¢»ņŅ»ĢåµÄĶ¶ŹÜ¹āĘ÷£Ø·“ÉäŠĶ£©”£ĘäĖūµÄŌö·ł²æ”¢æŲÖĘ²æ²ÉÓĆŅ»ĢåµÄ·Å“óĘ÷µ„ŌŖŠĪ”£ ĢŲ³¤ Ķ¶ŹÜ¹āĘ÷½öÓÉĶ¶¹āŌŖ¼ž”¢ŹÜ¹āŌŖ¼ž¼°¹āѧĻµĶ³¹¹³É£¬ĖłŅŌæÉŅŌ²ÉÓĆŠ”ŠĶ”£ ¼“Ź¹ŌŚĻĮŠ”µÄ³”ĖłÉčÖĆĶ¶”¢ŹÜ¹āĘ÷£¬Ņ²æÉŌŚ½ĻŌ¶µÄ³”Ėłµ÷ÕūĮéĆō¶Č”£ Ķ¶?ŹÜ¹ā²æÓė·Å“óĘ÷µ„ŌŖ¼äµÄŠÅŗÅĻßŗÜČŻŅ׏ÜøÉČÅ”£ “ś±ķ»śŠĶ£Ø·Å“óĘ÷µ„ŌŖ£©£ŗE3C-LDA”¢E3C (2)·Å“óĘ÷ÄŚÖĆŠĶ ³żµēŌ“²æŅŌĶāĪŖŅ»Ģ唣(¶ŌÉäŠĶ·ÖĪŖ°üĄØĶ¶¹ā²æµÄĶ¶¹āĘ÷ŗĶ°üĄØŹÜ¹ā²æ”¢Ōö·ł²æ”¢æŲÖĘ²æµÄŹÜ¹āĘ÷Į½ÖÖ)”£µēŌ“²æµ„¶Ą²ÉÓƵēŌ“µ„ŌŖµČŠĪד”£ ĢŲ³¤ ÓÉÓŚŹÜ¹ā²æ”¢Ōö·ł²æ”¢æŲÖĘ²æĪŖŅ»Ģ壬ĖłŅŌ²»ŠčŅŖĪ§ČĘĪ¢Š”ŠÅŗŵĊÅŗÅĻߣ¬²»Ņ׏ÜøÉČŵÄÓ°Ļģ”£ Óė·Å“óĘ÷·ÖĄėŠĶĻą±Č£¬²¼Ļß¹¤Ź±øüÉŁ”£ Ņ»°ć±Č·Å“óĘ÷·ÖĄėŠĶ“󣬵«ÓėƻӊĮéĆō¶Čµ÷ÕūµÄĄąŠĶĻą±Č£¬¾ų²»Ń·É«”£ “ś±ķ»śŠĶ£ŗE3Z”¢E3T”¢E3S-C (3)µēŌ“ÄŚÖĆŠĶ Į¬µēŌ“²æŅ²°üŗ¬ŌŚĶ¶¹āĘ÷”¢ŹÜ¹āĘ÷ÖŠµÄŅ»Ģå»Æ²śĘ·”£ ĢŲ³¤ æÉÖ±½ÓĮ¬½Óµ½ÉĢÓƵēŌ“ÉĻ£¬“ĖĶā»¹ÄÜ“ÓŹÜ¹āĘ÷Ö±½Ó½ųŠŠČŻĮæ½Ļ“óµÄæŲÖĘŹä³ö”£ Ķ¶¹āĘ÷”¢ŹÜ¹āĘ÷ÖŠ»¹°üĄØĮĖµēŌ“±äŃ¹Ę÷µČ£¬ĖłŅŌÓėĘäĖūŠĪĢ¬Ļą±ČŗÜ“ó”£ “ś±ķ»śŠĶ£ŗE3G”¢E3JK”¢E3JM (4)¹āĻĖŠĶ ŹĒŌŚĶ¶¹ā²æ”¢ŹÜ¹ā²æÉĻĮ¬½Ó¹āĻĖµÄ²śĘ·”£ÓɹāĻĖµ„ŌŖŗĶ·Å“óĘ÷µ„ŌŖ¹¹³É£¬µ«±¾¹«Ė¾Ć»ÓŠµēŌ“ÄŚÖĆµÄ·Å“óĘ÷µ„ŌŖĻµĮŠ²śĘ·”£ ĢŲ³¤ øł¾Ż¹āĻĖĢ½Ķ·£ØĒ°¶Ė²æ·Ö£©µÄ×éŗĻ²»Ķ¬£¬æɹ¹³É¶ŌÉäŠĶ»ņ·“ÉäŠĶ”£ ŹŹŗĻÓŚ¼ģ²āĪ¢Š”ĪļĢ唣 ¹āĻĖµ„ŌŖ²»ŹÜøÉČŵÄÓ°Ļģ”£ “ś±ķ»śŠĶ£Ø·Å“óĘ÷µ„ŌŖ£©£ŗE3X-DA-S”¢E3X-MDA”¢E3X-NA
“«øŠĘ÷ŹõÓļ½āĖµ
| ĻīÄæ | ĖµĆ÷Ķ¼ | ŗ¬Ņå | |
|
¼ģ²ā¾ąĄė |
¶ŌÉäŠĶ |
|
ŌŚ¶ŌÉäŠĶ”¢»Ų¹é·“ÉäŠĶÖŠ æ¼ĀĒµ½²śĘ·µÄ·ÖÉ¢ŗĶĪĀ¶Č±ä»ÆµČ£¬ÄÜĪȶØÉč¶ØµÄ**¼ģ²ā¾ąĄė”£ ±ź×¼×“Ģ¬ĻĀµÄŹµĮ¦ÖµĪŽĀŪÄÄÖÖ·½Ź½¶¼±Č¶ī¶Ø¼ģ²ā¾ąĄėøü³¤”£ |
| »Ų¹é·“ÉäŠĶ |
|
||
| Ą©É¢É¢ÉäŠĶ |
|
ŌŚĄ©É¢·“ÉäŠĶÖŠ ¶Ō±ź×¼¼ģ²āĪļĢå£Ø°×»Ö½£©£¬æ¼ĀĒµ½²śĘ·µÄ·ÖÉ¢ŗĶĪĀ¶Č±ä»ÆµČ£¬ÄÜĪȶØÉč¶ØµÄ**¼ģ²ā¾ąĄė”£ ±ź×¼×“Ģ¬ĻĀµÄŹµĮ¦ÖµĪŽĀŪÄÄÖÖ·½Ź½¶¼±Č¶ī¶Ø¼ģ²ā¾ąĄėøü³¤”£ |
|
| ĻŽ¶Ø·“ÉäŠĶ |
|
ŌŚĻŽ¶Ø·“ÉäŠĶÖŠ Čē×óĶ¼µÄ¹āѧĻµĶ³£¬Éč¼ĘŹ±Ź¹Ķ¶¹āÖįÓėŹÜ¹āÖįŌŚ¼ģ²āĪļĢåµÄ±ķĆęŅŌĶ¬ŃłµÄĒ抱½Ē ¦Č ½»²ę”£ ŌŚøĆ¹āѧĻµĶ³ÖŠ£¬“ÓĪļĢå·¢³öµÄÕż·“Éä¹āÄÜĪČ¶Ø¼ģ²ā³öµÄ¾ąĄė·¶Ī§ĪŖ¼ģ²ā¾ąĄė”£Ņņ“Ė£¬¼ģ²ā¾ąĄėøł¾ŻĘäĻĀĻŽŗĶÉĻĻŽ£¬±ķĻÖĪŖ”ø10”«35mm”¹”££Ø”ś²Ī¼ū1296Ņ³£© |
|
| ±ź¼Ē“«øŠĘ÷ |
|
ŌŚ±ź¼Ē“«øŠĘ÷ÖŠ Čē×óĶ¼µÄ¹āѧĻµĶ³£¬Éč¼ĘŹ±Ź¹ŹÜ¹āÖįĻą¶ŌÓŚŗĶ¼ģ²āĪļĢ哹ֱµÄĶ¶¹āÖįŌŚ¦Č½»²ę”£ Ņņ“ĖŹÜ¹ā²æ½«²»ŹÜ¼ģ²āĪļĢåµÄÕż·“Éä¹āÓ°Ļģ£¬¶ųÖ»½ÓŹÜĄ©É¢·“Éä¹ā£¬æɶŌ¼ģ²āĪļĢåµÄ”øŃÕÉ«”¹½ųŠŠ¼ģ²ā”£ |
|
| Éč¶Ø·¶Ī§/¼ģ²ā·¶Ī§ | ¾ąĄėÉč¶ØŠĶ |
|
ŌŚ¾ąĄėÉč¶ØŠĶÖŠ æɶŌĪļĢåµÄ¼ģ²āĪ»ÖĆĻŽ¶Č½ųŠŠÉč¶Ø”£Ļą¶ŌÓŚ±ź×¼¼ģ²āĪļĢå£Ø°×»Ö½£©æÉÉč¶ØµÄ·¶Ī§³ĘĪŖÉč¶Ø·¶Ī§”£ ±»Éč¶ØµÄĪ»ÖĆ×÷ĪŖĻŽ¶Č£¬½«Äܼģ²āĪļĢåµÄ·¶Ī§³ĘĪŖ¼ģ²ā·¶Ī§”£¼ģ²ā·¶Ī§øł¾Ż“«øŠĘ÷µÄ¼ģ²āÄ£Ź½¶ų²»Ķ¬£¬ÓŠŹ±“ęŌŚÓŚÉč¶ØĪ»ÖĆæŖŹ¼µÄ“«øŠĘ÷Ņ» ²ą£ØBGSÄ£Ź½£©£¬»ņŌ¶ĄėÉč¶ØĪ»ÖƵÄŅ»²ą£ØFGSÄ£Ź½£©”££Ø”ś²Ī¼ū1295Ņ³£© |
| ÖøĻņ½Ē |
|
¶ŌÉäŠĶ”¢»Ų¹é·“ÉäŠĶ ×÷ĪŖ¹āµē“«øŠĘ÷æɶÆ×÷µÄ½Ē¶Č·¶Ī§”£ |
|
| ²ī¶ÆµÄ¾ąĄė |
|
Ą©É¢·“ÉäŠĶ”¢¾ąĄėÉč¶ØŠĶ ¶Æ×÷¾ąĄėÓė»Ų¹é¾ąĄėµÄ²ī”£ Ņ»°ćÓĆ²śĘ·Ńł±¾ÖŠĻą¶ŌÓŚ¶ī¶Ø¼ģ²ā¾ąĄėµÄ±ČĀŹĄ“±ķŹ¾”£ |
|
| ĪŽøŠ“ų |
|
ŌŚ±ź¼Ē“«øŠĘ÷”¢¾ąĄėÉč¶ØŠĶ”¢ĻŽ¶Ø·“ÉäŠĶ”¢Ą©É¢·¢ÉäŠĶ”¢»Ų¹é·“ÉäŠĶÖŠ£¬½«ĄėĶø¾µĆę½üĒŅŌ¶ĄėĶ¶¹āĒųÓņ”¢ŹÜ¹āĒųÓņµÄĒųÓņ³ĘĪŖ"ĪŽøŠ“ų"£¬ŌŚĪŽøŠ“ųÖŠĪŽ·Ø¼ģ²ā”£ | |
| ĻģÓ¦Ź±¼ä |
|
“Ó¹āŹäČėµÄ¶ĻŠųæŖŹ¼£¬µ½æŲÖĘŹä³ö¶Æ×÷»ņ»Ų¹éĪŖÖ¹µÄŃÓ³ŁŹ±¼ä³ĘĪŖ”øĻģÓ¦Ź±¼ä”¹”£ ŌŚ¹āµē“«øŠĘ÷ÖŠ£¬Ņ»°ć¶Æ×÷Ź±¼ä£ØTon£©»Ų¹éŹ±¼ä£ØToff£©”£ |
|
| ĻīÄæ | ĖµĆ÷Ķ¼ | ŗ¬Ņå |
|
ÕŚ¹ā¶Æ×÷ DARK ON |
|
ÕŚ¹ā¶Æ×÷£ØDARK ON£©µÄ¶ØŅå ŹĒÖøŌŚ¶ŌÉäŠĶÖŠÕŚ±ĪĶ¶¹ā¹āŹųµČĒéæöĻĀ£¬½ųČėŹÜ¹āĘ÷µÄ¹āĮæ¼õÉŁµ½±ź×¼ŅŌĻĀŹ±µÄŹä³ö¶Æ×÷£¬±ķŹ¾ĪŖ¶Æ×÷Ä£Ź½£ŗÕŚ¹āŹ±ON£¬ DARK ON”£ Čė¹ā¶Æ×÷£ØLIGHT ON£©µÄ¶ØŅå ŹĒÖøŌŚĄ©É¢·“ÉäŠĶÖŠ£¬½Ó½ü¼ģ²āĪļĢåµČĒéæöĻĀ£¬½ųČėŹÜ¹āĘ÷µÄ¹āĮæŌö¼Óµ½±ź×¼ŅŌÉĻŹ±µÄŹä³ö¶Æ×÷£¬±ķŹ¾ĪŖ¶Æ×÷Ä£Ź½£ŗČė¹āŹ±ON£¬LIGHT ON”£ |
|
Čė¹ā¶Æ×÷ LIGHT ON |
|
|
| Ź¹ÓĆ»·¾³ĮĮ¶Č |
|
Ź¹ÓĆ»·¾³ĮĮ¶ČÓĆŹÜ¹āĘ÷µÄŹÜ¹āĆęĮĮ¶Č±ķŹ¾£¬²¢½«ŹÜ¹āŹä³öĻą¶ŌÓŚ200lxŹ±µÄÖµ±ä»Æ”Ą20£„Ź±µÄĮĮ¶Č¶ØŅåĪŖ”øŹ¹ÓĆ»·¾³ĮĮ¶Č”¹”£ ²¢²»ŹĒ½ųŠŠĪó¶Æ×÷Ö®Ē°µÄ¶Æ×÷½ēĻŽĮĮ¶Č”£ |
| ±ź×¼¼ģ²āĪļĢå |
|
ĪŽĀŪ¶ŌÉäŠĶ»ņ»Ų¹é·“ÉäŠĶ£¬¶¼½«¾ßÓŠ±Č¹āѧĻµĶ³µÄ¶Ō½ĒĻß³¤¶Čøü“óÖ±¾¶µÄ²»ĶøĆ÷Ģå²āøĖ×÷ĪŖ±ź×¼¼ģ²āĪļĢ唣 Ņ»°ćŌŚ¶ŌÉäŠĶÖŠ£¬½«Ķ¶?ŹÜ¹āĶø¾µµÄ¶Ō½ĒĻß³¤¶Č×÷ĪŖ±ź×¼¼ģ²āĪļĢåµÄÖ±¾¶£¬¶ųŌŚ»Ų¹é·“ÉäŠĶÖŠŌņŹ¹ÓĆ·“Éä°åµÄ¶Ō½ĒĻß³¤¶Č”£ øł¾Ż·“Éä°åµÄ±ź×¼ĪļĢåµÄ“óŠ” ŌŚĄ©É¢·“ÉäŠĶÖŠ£¬½«±ČĶ¶¹ā¹āŹųÖ±¾¶øü“óµÄ°×»Ö½×÷ĪŖ±ź×¼¼ģ²āĪļĢ唣 |
| **Š”¼ģ²āĪļĢå |
|
¶ŌÉäŠĶ”¢»Ų¹é·“ÉäŠĶµÄĒéæöĻĀ£¬ŌŚ¶ī¶Ø¼ģ²ā¾ąĄėÉĻ½«ĮéĆō¶Čµ÷ÕūĪŖĪȶØČė¹ā¶Æ×÷Öµ£¬½«æɼģ²āµÄ**Š”¼ģ²āĪļĢå×÷ĪŖ“ś±ķĄż”£
ŌŚ·“ÉäŠĶÖŠ£¬½«ĮéĆō¶ČÉč¶ØĪŖ**£¬½«æɼģ²āµÄ**Š”¼ģ²āĪļĢå×÷ĪŖ“ś±ķĄż”£
|
|
°²×°ĻĮ·ģŹ±µÄ**Š”¼ģ²āĪļĢå |
|
¶ŌÉäŠĶ ŌŚĶ¶”¢ŹÜ¹āĘ÷Į½ÕßÉĻ¶¼°²×°ĻĮ·ģ£¬ŌŚ¶ī¶Ø¼ģ²ā¾ąĄėÉĻ½«ĮéĆō¶Čµ÷ÕūĪŖ½ųŠŠÕżČ·Čė¹ā¶Æ×÷µÄÖµ£¬Čē×óĶ¼ĖłŹ¾£¬½«¼ģ²āĪļĢåŃŲĻĮ·ģµÄ½Ļ³¤·½ĻņĘ½ŠŠŅĘ¶Æ£¬½«æɼģ²āµÄ**Š”¼ģ²āĪļĢå×÷ĪŖ“ś±ķĄż”£ |
ĢŲŠŌŹż¾ŻµÄ¶Į·Ø
¶ŌÉäŠĶ/»Ų¹é·“ÉäŠĶ
| Ę½ŠŠŅʶÆĢŲŠŌ | ŹÜ¹āŹä³öÓą¶Č£¾ąĄėĢŲŠŌ |
|
|
|
¶ŌÉäŠĶµÄĒéæöĻĀ£ŗ±ķŹ¾ŅŃ¹Ģ¶ØĶ¶¹āĘ÷Ź±£¬ŹÜ¹āĘ÷µÄ¼ģ²ā½ēĻŽĪ»ÖĆ”£ »Ų¹é·“ÉäŠĶµÄĒéæöĻĀ£ŗ±ķŹ¾ŅŃ¹Ģ¶Ø“«øŠĘ÷µÄĪ»ÖĆŹ±£¬»Ų¹é·“Éä°éµÄ¼ģ²ā½ēĻŽĪ»ÖĆ”£ ĪŽĀŪÄÄÖÖĒéæöĻĀ£¬ŠżÅ„¾łĪŖMAX”£±»ÉĻĻĀĮ½²ąµÄĻßĪ§×”µÄĒųÓņŹĒæɼģ²āĒųÓņ”£ ÉčÖƶąøö¶ŌÉäŠĶµÄĒéæöĻĀ£¬ĪŖĮĖ±ÜĆāĻą»„øÉČÅ£¬ŠčŅŖĶ¼Ź¾1.5±¶µÄĒųÓņ”£ |
ŹÜ¹āŹä³öÓą¶ČÓƶŌĮéĆō¶Č½ųŠŠ**Éč¶ØĒéæöĻĀµÄŹżÖµĄ“±ķŹ¾”£ ÉĻŹöĪŖ¶ī¶Ø¼ģ²ā¾ąĄėĪŖ15mµÄ»śŠĶµÄŹ¾Ąż”£ŌŚ¶ī¶Ø¼ģ²ā¾ąĄėÖŠ£¬ÄܶĮČ”Ō¼6±¶µÄŹÜ¹āŹä³öÓą¶Č”£ |
Ą©É¢·“ÉäŠĶ
| ¶Æ×÷ĒųÓņĢŲŠŌ | ¼ģ²ā¾ąĄė-¼ģ²āĪļĢåµÄ“óŠ”ĢŲŠŌ |
|
|
|
±ķŹ¾½«±ź×¼¼ģ²āĪļĢåŃŲY·½Ļņ£ØÓė¹āÖį“¹Ö±µÄ·½Ļņ£©ŅĘ¶ÆŹ±£¬¼ģ²āæŖŹ¼µÄĪ»ÖĆ”£ ŌŚĶ¼ÖŠ£¬ĻņĻĀ²ąĶäĒśµÄĶ¼±ķ£¬ŹĒ½«¼ģ²āĪļĢå“ÓĻĀ²ąŅĘ¶ÆŹ±µÄĶ¼±ķ”£ |
±ķŹ¾øł¾Ż¼ģ²āĪļĢåµÄ“óŠ”ŗĶ±ķĆęŃÕÉ«µÄ²»Ķ¬£¬¼ģ²ā¾ąĄė±ä»ÆµÄĒéæö”£ ÕāŠ©ŹĒĻą¶ŌÓŚ±ź×¼¼ģ²āĪļĢåµÄÖµ£¬¼ģ²āĪļĢåČē¹ū·¢Éś±ä»Æ£¬¶Æ×÷ĒųÓņ”¢¼ģ²ā¾ąĄėŅ²·¢Éś±ä»Æ”£ |
Ą©É¢·“ÉäŠĶ/»Ų¹é·“ÉäŠĶ
| ¼ģ²āĪļĢåµÄæķ¶ČÓė¶Æ×÷ĒųÓņ | ¼ģ²āĪļĢåµÄ±ķĆęŃÕÉ«Óė¼ģ²ā¾ąĄė |
|
|
|
±ķŹ¾øł¾Ż¼ģ²āĪļĢåµÄæķ¶Č²»Ķ¬£¬“«øŠĘ÷µÄ¶Æ×÷ĒųÓņµÄ±ä»Æ”£ ø÷øöĶ¼±ķÖŠĪ§×”µÄĒųÓņ£¬ŹĒĻą¶ŌÓŚø÷øö¼ģ²āĪļĢåæķ¶ČµÄ¶Æ×÷ĒųÓņ”£ |
Ź¹ÓĆ·“ÉäŠĶµÄ¹āµē“«øŠĘ÷Ź±£¬¼ģ²āĪļĢåµÄ±ķĆęŃÕÉ«ŗĶ¹āŌ󽫶Ō¼ģ²ā¾ąĄėŗĶ¶Æ×÷ĒųÓņ²śÉśÓ°Ļģ”£ ±ķŹ¾¼ģ²āĪļĢå±ķĆęµÄ·“ÉäĀŹŌ½øߣ¬¼ģ²ā¾ąĄėŌ½³¤”£ |
| ¼ģ²āĪļĢåµÄ±ķĆęŃÕÉ«”¢¹āŌóÓė¶Æ×÷ĒųÓņ |
|
|
±ķŹ¾·“ÉäĀŹ****ŗŚµÄ¼ģ²āĪļĢåµÄ¶Æ×÷(¼ģ²ā)ĒųÓņ**Š””£ ÓÉÓŚSUSŗĶĀĮ²ÓŠ¹āŌó£¬ĖłŅŌ¼ģ²ā¾ąĄė±ä³¤£¬µ«¹āŌŚ±ķĆę²»»įĄ©É¢·“É䣬½ųŠŠÕż·“É䣬 ĖłŅŌ¶Æ×÷ĒųÓņ±ČŹ¹ÓĆ°×Ö½Ź±øüĻĮÕ”£ |
Ź¹ÓĆ·½·ØÓėø÷ÖÖŹż¾Ż
¢Ł**Š”¼ģ²āĪļĢåÓėĶø¾µÖ±¾¶”¢ĮéĆō¶ČµÄ¹ŲĻµ
¢Ś¶Ī²ī¼ģ²ā Ķعżæɼģ²ā¶Ī²īŗĶÉč¶Ø¾ąĄė½ųŠŠŃ”Ōń£Ø“ś±ķĄż£© ![]()
|
ŠĪד |

|
|

|
|

|
|
|
ĢŲ³¤ |
¹āĻĖŹ½ |
¹āĻĖŹ½ |
·Å“óĘ÷ÄŚÖĆŠĶ ³¬Š”ŠĶ |
·Å“óĘ÷·ÖĄėŠĶ | ·Å“óĘ÷ÄŚÖĆŠĶ | ·Å“óĘ÷ÄŚÖĆŠĶ |
| ŠĶŗÅ | E32-L25A | E32-L25L | E3T-SL1”õ | E3C-LS3R | E3Z-LS | E3S-CL1 |
|
µĒŌŲŅ³ |
16 | 190 | 124 | 152 | 210 | |
![]()
¢ŪM.S.R.¹¦ÄÜ£ØMirror Surface Rejection£ŗ¾µĆęĢå¹āŌóĒå³ż£© ”²ŌĄķ”³ ĄūÓĆ»Ų¹é·“ÉäŠĶµÄ¹āµē“«øŠĘ÷ÄŚÖƵÄĘ«¹ā¹żĀĖĘ÷ŗĶ»Ų¹é·“Éä°åµÄĢŲŠŌ£¬Ö»½ÓŹÜ»Ų¹é·“Éä°åµÄ·“Éä¹āµÄ¹¦ÄÜ”¢½į¹¹”£ ĶعżĶ¶¹ā²ąĘ«¹ā¹żĀĖĘ÷µÄ¹ā½«±äĪŖŗįĻņĘ«¹ā”£ ·“Éäµ½»Ų¹é·“Éä°åČżĆęÖ±½ĒĄā¾µµÄ¹āĻߣ¬ĘäĘ«¹ā·½Ļņ½«“ÓŗįĻņ±äĪŖׯĻņ”£ Ęä·“Éä¹ā½«ĶعżŹÜ¹ā²ąµÄĘ«¹ā¹żĀĖĘ÷£¬µ½“ļŹÜ¹āŌŖ¼ž”£
”²ÄæµÄ”³ ÓĆÓŚ¶Ō±ķĆęĪŖ¾µĆęדµÄ¼ģ²āĪļĢå½ųŠŠĪČ¶Ø¼ģ²āµÄŅ»ÖÖ·½·Ø”£ ÕāÖÖ¼ģ²āĪļĢå·¢³öµÄ·“Éä¹ā£¬ĘäĘ«¹ā·½Ļņ±£³ÖŗįĻņ£¬ĖłŅŌĪŽ·ØĶعżŹÜ¹ā²ąµÄĘ«¹ā¹żĀĖĘ÷”£ ”²Ąż”³ ¼ģ²āĪļĢåµÄ±ķĆę“Ö²Ś£¬Ć»ÓŠ¹āŌóµÄĒéæöĻĀ£Ø¢Ś£©£¬¼“Ź¹Ć»ÓŠM.S.R.¹¦ÄÜŅ²Äܼģ²ā”£ Ļą·“£¬¼ģ²āĪļĢåµÄ±ķĆę¹ā»¬ĒŅ“ų¹āŌóµÄĒéæöĻĀ£Ø¢Ū£©£¬Ć»ÓŠM.S.R.¹¦ÄÜŌņĪŽ·Ø½ųŠŠĪČ¶Ø¼ģ²ā”£ ¢ŁĆ»ÓŠ¼ģ²āĪļĢåµÄĒéæöĻĀĶ¶¹ā²æ·¢³öµÄ¹āÕÕÉäµ½·“Éä°å£¬²¢»Ųµ½ŹÜ¹ā²æ”£
¢Ś¼ģ²āĪļĢåƻӊ¹āŌóµÄĒéæöĻĀ Ķ¶¹ā²æ·¢³öµÄ¹ā±»¼ģ²āĪļĢåÕŚ±Ī£¬²»µ½“ļ·“Éä°å£¬Ņ²²»»Ųµ½ŹÜ¹ā²æ”£
¢Ū¼ģ²āĪļĢåµÄ±ķĆę¹ā»¬ĒŅÓŠ¹āŌóµÄĒéæöĻĀ£ØĄż£ŗµē³Ų”¢Ę湎µČ£© Ķ¶¹ā²æ·¢³öµÄ¹āĶعż¼ģ²āĪļĢå·“É䣬øĆ·“Éä¹ā½«»Ųµ½ŹÜ¹ā²æ”£
”²×¢Ņā”³ ¶Ō¹āŌó¶Č·Ē³£øߵļģ²āĪļĢåŗĶÕ³Ģł½ŗʬµČµÄ¹āŌóĪļĢå½ųŠŠ¼ģ²āµÄĒéæöĻĀ£¬ÓŠŹ±¶Æ×÷»į²»ĪČ¶Ø”£ ÕāŃłµÄĒéæöĻĀ£¬Ēė½«“«øŠĘ÷Ļą¶ŌÓŚ¼ģ²āĪļĢåµÄ±ķĆęĒ抱°²×°”£ “ųM.S.R.¹¦ÄܵĻŲ¹é·“ÉäŠĶ
| “ųM.S.R.¹¦ÄܵĻŲ¹é·“ÉäŠĶ | µĒŌŲŅ³ | |
| °“¹¹³É·ÖĄą | ŠĶŗÅ | |
| ¹āĻĖŹ½ | E32-R21”¢E32-R16 | 16 |
| ·Å“óĘ÷ÄŚÖĆŠĶ | E3Z-R61/R66/R81/R86 | 140 |
| >E3S-CR11(-M1J)/CR61(-M1J) | 200 | |
| E3S-CR62/67 | 312 | |
| ·Å“óĘ÷·ÖĄėŠĶ | E3C-LR11/LR12 | 108 |
| µēŌ“ÄŚÖĆŠĶ | E3JM-R4”õ4(T)”¢E3JK-R2M”õ/R2S3 | 238 |
| ĶøĆ÷Ģå¼ģ²ā“«øŠĘ÷ | E3S-R11/R31/R61/R81/R16/R36/R66/R86 | 318 |
Ź¹ÓĆM.S.R.¹¦ÄÜÉĢĘ·µÄĒéæöĻĀ£¬ĒėĪń±ŲŹ¹ÓƱ¾¹«Ė¾µÄ·“Éä°å”£
ĪŽM.S.R.¹¦ÄܵĻŲ¹é·“ÉäŠĶ ĪŽM.S.R.¹¦ÄܵĻŲ¹é·“ÉäŠĶ¶ŌÓŠ¹āŌóµÄĪļĢå½ųŠŠ¼ģ²āµÄĒéæöĻĀ£¬Ēė½«“«øŠĘ÷Ļą¶ŌÓŚ¼ģ²āĪļĢåĒ抱ÉčÖĆ£¬±ÜĆāÕż·“É䔣
| ĪŽM.S.R.¹¦ÄܵĻŲ¹é·“ÉäŠĶ | µĒŌŲŅ³ | |
| °“¹¹³É·ÖĄą | ŠĶŗÅ | |
| ĶøĆ÷Ģå¼ģ²ā“«øŠĘ÷ | E3Z-B61/B62/B66/B67/B81/B82/B86/B87 | 141 |
| E3S-R12/R62/R17/R67 | 318 | |
ĶøĆ÷Ģå“«øŠĘ÷Ń”¶Ø·½·Ø Ēė°“ŅŌĻĀ²½ÖčŃ”¶Ø”£
¢Ü±ķĆęŃÕÉ«Óė¹āŌ“µÄ·“ÉäĀŹ
±ķĆęŃÕÉ«µÄ·“ÉäĀŹĢŲŠŌ
æÉÅŠ±šŃÕÉ«±ź¼ĒµÄŃÕÉ« ŹŹÓĆ“«øŠĘ÷¹āŌ“É«£ŗ![]() £ŗŗģÉ«¹āŌ“
£ŗŗģÉ«¹āŌ“![]() £ŗĀĢÉ«¹āŌ“
£ŗĀĢÉ«¹āŌ“![]() £ŗĄ¶É«¹āŌ“ RGB¹āŌ“ŠĶÄÜĀś×ćĖłÓŠ×éŗĻ”£
£ŗĄ¶É«¹āŌ“ RGB¹āŌ“ŠĶÄÜĀś×ćĖłÓŠ×éŗĻ”£ 
ŹżÖµŹĒøł¾Żµ×É«ŗĶ±ź¼ĒµÄ·“Éä¹ā±ČĀŹµÄ“ś±ķĄż”£
| “«øŠĘ÷¹āŌ“É« | °“¹¹³É·ÖĄą | ŠĶŗÅ | µĒŌŲŅ³ |
ŗģÉ«¹āŌ“
|
¹āĻĖŹ½ | E3X-DA-S/E3X-MDA | 68 |
| E3X-NA | 86 | ||
| ·Å“óĘ÷·ÖĄėŠĶ |
E3C-VS3R E3C-VM35R E3C-VS7R |
276 | |
Ą¶É«¹āŌ“
|
¹āĻĖŹ½ | E3X-DAB11-S | 68 |
|
ĀĢÉ«¹āŌ“ |
¹āĻĖŹ½ | E3X-DAG11-S | 68 |
| E3X-NAG11 | 86 | ||
| ·Å“óĘ÷·ÖĄėŠĶ | E3C-VS1G | 276 | |
RGB¹āŌ“
|
·Å“óĘ÷ÄŚÖĆŠĶ | E3MC-A | 256 |
| ¹āĻĖŹ½ | E3MC-X/Y |
¢Ż×ŌĪŅÕļ¶Ļ¹¦ÄÜ ×ŌĪŅÕļ¶Ļ¹¦ÄÜ£¬ŹĒÖø¶ŌÉčÖĆŗóµÄ»·¾³±ä»Æ£¬ĢŲ±šŹĒ»·¾³ĪĀ¶Č±ä»ÆµÄÓą¶Č½ųŠŠ×ŌĪŅÕļ¶Ļ£¬ĶعżĻŌŹ¾µĘŗĶŹä³ö½ųŠŠĶØÖŖµÄ¹¦ÄÜ”£ÓŠĄūÓŚĢįŌē·¢ĻÖŅņ¹ŹÕĻŗĶ³¤Äź±ä»ÆŅżĘšµÄ“«øŠĘ÷ĪŪČ¾”¢¹āÖįĘ«Ī»µČ”£ ”²ŌĄķ”³ ¶Ō“Ó“«øŠĘ÷µÄĪȶØדĢ¬Ļņ²»ĪȶØדĢ¬µÄ±ä»Æ½ųŠŠĶØÖŖµÄ¹¦ÄÜ£¬æÉÓėĻŌŹ¾¹¦ÄÜŗĶŹä³ö¹¦ÄÜĆ÷ĻŌĒų·Ö”£
![]()
ĪȶØĻŌŹ¾µĘ£ØĀĢÉ«LED£© ¶ŌÉčÖĆŗóµÄ»·¾³±ä»Æ£ØĪĀ¶Č”¢µēŃ¹”¢»Ņ³¾µČ£©µÄÓą¶Č½ųŠŠ×ŌĪŅÕļ¶Ļŗó£¬ÓĆĻŌŹ¾µĘĻŌŹ¾”££ØČē¹ūÓą¶Č×ć¹»£¬Ōņ»įĮĮµĘ£©”£ ¶Æ×÷ĻŌŹ¾µĘ£Ø³ČÉ«LED£© ĻŌŹ¾Źä³öµÄדĢ¬”£
![]()
¶ŌĻŌŹ¾µĘ±ķŹ¾µÄÓą¶Č½ųŠŠŹä³öŗ󣬽ųŠŠĶØÖŖ”£
”²ÄæµÄ”³ ÄÜŌ¤²ā¹āµē“«øŠĘ÷µÄ¹āÖįĘ«Ąė”¢Ķø¾µĆę£Ø“«øŠĘ÷Ćę£©µÄĪŪČ¾”¢µŲĆęŗĶ±³¾°µÄÓ°Ļģ”¢Ķā²æøÉČŵÄדĢ¬µČ“«øŠĘ÷µÄŅģ³£ŗĶ¹ŹÕĻ£¬ÓŠĄūÓŚ½ųŠŠŃų»¤£¬ŅŌ±ćÉč±øĪČ¶Ø¹¤×÷”£ ”²Ąż”³Čė¹āŹ±ONµÄĒéæöĻĀ
| ĻŌŹ¾µĘµÄדĢ¬ |
³ČÉ«ĻŌŹ¾µĘĖł±ķŹ¾µÄČė? ÕŚ¹āדĢ¬ |
ĀĢÉ«ĻŌŹ¾µĘĻŌŹ¾µÄĪĀ¶Č±ä»ÆĖł¶ŌÓ¦µÄÓą¶Č | ×ŌĪŅÕļ¶ĻŹä³ö | Õļ¶ĻĒéæöŹ¾Ąż |
 
|
Čė¹ā ³ČÉ«ĻŌŹ¾µĘ £ŗµĘĮĮ |
æÉĪČ¶ØŹ¹ÓĆ”£ £ØÓą¶Č10”«20£„ŅŌÉĻ£©£ØĀĢÉ«ĻŌŹ¾µĘ£ŗµĘĮĮ£© |
££ | ££ |

|
ĪȶØÓą¶Č ²»³ä·Ö”£ £ØĀĢÉ«ĻŌŹ¾µĘ£ŗµĘĆš£© |
ÕāÖÖדĢ¬³ÖŠųŅ»¶ØŹ±¼äŅŌÉĻŹ±£¬æÉĶعżŹä³öĶØÖŖøĆĒéæö”£ |
|
|

|
ÕŚ¹ā  ³ČÉ«ĻŌŹ¾µĘ £ŗµĘĆš |
|
||

|
æÉĪČ¶ØŹ¹ÓĆ”£ £ØÓą¶Č10”«20£„ŅŌÉĻ£©£ØĀĢÉ«ĻŌŹ¾µĘ£ŗµĘĮĮ£© |
££ | ££ |
”“ŹŹÓĆ»śŠĶ”µ
| °“¹¹³É·ÖĄą | ŠĶŗÅ | ×ŌĪŅÕļ¶Ļ¹¦ÄÜ | µĒŌŲŅ³ | |
| ĻŌŹ¾¹¦ÄÜ | Źä³ö¹¦ÄÜ | |||
| ¹āĻĖŹ½ | E3X-DA-S | Źż×ÖĻŌŹ¾ | ”ń | 68 |
| E3X-MDA | Źż×ÖĻŌŹ¾ | £ | ||
| E3X-NA |
”ń |
”ń | 86 | |
| ·Å“óĘ÷·ÖĄėŠĶ | E3C-LDA | Źż×ÖĻŌŹ¾ | ”ń | 108 |
| E3C | ”ń | ”ń(E3C-JC4P) | 124 | |
| E3Z | ”ń | £Ŗ | 140 | |
| E3T | ”ń | £ | 190 | |
| E3S-C | ”ń | £ | 200 | |
| E3S-CL | ”ń | £ | 210 | |
| E3S-CR62/67 | ”ń | £ | 312 | |
| E3S-R | ”ń | £ | 318 | |
¹ŲÓŚE3ZµÄ×ŌĪŅÕļ¶ĻŹä³öŠĶ£¬Ēė×ÉŃÆ”£ ¢ŽĶā²æÕļ¶ĻŹäČė¹¦ÄÜ£ØĶ¶¹āĶ£Ö¹¹¦ÄÜ£© ”²ŌĄķ”³ Ķعż½«¶ŌÉäŠĶĶ¶¹āĘ÷µÄµ¼Ļß”ø·Ū”¹”øĄ¶”¹¼ä¶ĢĀ·£¬æÉŌŚČĪŅāŹ±¼äŹ¹Ķ¶¹āĶ£Ö¹”£
Ķ¶¹āĘ÷ŗĶŹÜ¹āĘ÷¼äƻӊ¼ģ²āĪļĢåŹ±£¬¼“Ź¹¶ŌĶ¶¹āĘ÷½ųŠŠON/OFFÉčÖĆ£¬Čē¹ūŹÜ¹āĘ÷²ąµÄŹä³öƻӊON/OFF£¬ĖµĆ÷“«øŠĘ÷·¢ÉśŅģ³£”£ ”²ÄæµÄ”³ ĶعżøĆ¹¦ÄÜ£¬ŌŚ¹¤×÷Ē°æɽųŠŠ“«øŠĘ÷µÄ¶Æ×÷¼ģ²é”£
¹²ĶØ×¢ŅāŹĀĻī ”ļø÷ÉĢĘ·µÄ×¢ŅāŹĀĻī£¬Ēė²Ī¼ūø÷ÉĢĘ·µÄ”ø ĒėÕżČ·Ź¹ÓĆ ”¹”£ ![]() ¾Æøę ²»ÄÜ×÷ĪŖ³åŃ¹µÄ°²Č«×°ÖĆ»ņĘäĖūČĖĢå±£»¤ÓĆ
¾Æøę ²»ÄÜ×÷ĪŖ³åŃ¹µÄ°²Č«×°ÖĆ»ņĘäĖūČĖĢå±£»¤ÓĆ
°²Č«×°ÖĆŹ¹ÓĆ”£
±¾²śĘ·Óė°²Č«ŠŌĪŽ¹Ų£¬Ö÷ŅŖÓĆÓŚ¹¤¼žŗĶ×÷Ņµ
Õߵļģ²āÓĆĶ¾”£ °²Č«ŅŖµć ĪŖĮĖČ·±£°²Č«£¬ĒėĪń±Ų×ńŹŲŅŌĻĀø÷ĻīÄæµÄÄŚČŻ”£ ”ń“«øŠĘ÷²¼Ļߏ±
|
¹ŲÓŚµēŌ“µēŃ¹ Ź¹ÓĆŹ±ĒėĪš³¬¹żŹ¹ÓƵēŃ¹·¶Ī§”£ ČēŌŚŹ¹ÓƵēŃ¹·¶Ī§ŅŌÉĻŹ©¼ÓµēŃ¹£¬»ņŌŚÖ±Į÷µēŌ“ŠĶµÄ“«øŠĘ÷ÉĻŹ©¼Ó½»Į÷µēŌ“£ØAC100VŅŌÉĻ£©£¬ŌņæÉÄܵ¼ÖĀĘĘĮŃ»ņÉÕ»Ł”£ |
“ś±ķĄż | |
|
¹ŲÓŚøŗŌŲ¶ĢĀ· Ēė±ÜĆāŹ¹øŗŌŲ¶ĢĀ·”£·ńŌņæÉÄÜŅżĘšĘĘĮŃ»ņÉÕ»Ł”£ |
|
££ |
|
¹ŲÓŚĪŽøŗŌŲµÄĮ¬½Ó ŅņĪŖĪŽøŗŌŲĒéæöĻĀ£¬Ö±½ÓĮ¬½ÓµēŌ“»įŅżĘšÄŚ²æŌŖ¼žĘĘĮŃ»ņÉÕ»Ł£¬ĖłŅŌĒėĪń±ŲŌŚÓŠøŗŌŲµÄĒéæöĻĀ½ųŠŠ²¼Ļß”£ |
|
|
|
¹ŲÓŚĪó²¼Ļß Ščæ¼ĀĒµēŌ“µÄ¼«ŠŌµČ£¬ĒėĪš“ķĪó²¼Ļß”£·ńŌņæÉÄÜŅżĘšĘĘĮŃ»ņÉÕ»Ł”£ |
|
|
| ¹ŲÓŚĪŽøŗŌŲµÄĮ¬½Ó ŅņĪŖĪŽøŗŌŲĒéæöĻĀ£¬Ö±½ÓĮ¬½ÓµēŌ“»įŅżĘšÄŚ²æŌŖ¼žĘĘĮŃ»ņÉÕ»Ł£¬ĖłŅŌĒėĪń±ŲŌŚÓŠøŗŌŲµÄĒéæöĻĀ½ųŠŠ²¼Ļß”£ |
|
|
”ńŹ¹ÓĆ»·¾³ ĒėĪšŌŚÓŠŅ×Č¼Ņ×±¬ĘųĢåµÄ»·¾³ĻĀŹ¹ÓĆ”£ Ź¹ÓĆ×¢ŅāŹĀĻī ”ńÉč¼ĘŹ± ¹ŲÓŚµēŌ“ø“Ī»Ź±¼ä “«øŠĘ÷ŌŚµēŌ“½ÓĶØŗó100msŅŌÄŚ½ųČėæɼģ²āדĢ¬”£ øŗŌŲÓė“«øŠĘ÷Į¬½ÓŌŚ²»Ķ¬µēŌ“Ź±£¬ĒėĪń±ŲĻČ½ÓĶØ“«øŠĘ÷µÄµēŌ“”£“ĖĶā£¬²»Ķ¬µÄĒéæöŌŚø÷ÉĢĘ·µÄ”ø ĒėÕżČ·Ź¹ÓĆ ”¹ÖŠÓŠĖł¼ĒŌŲ”£ ¹ŲÓŚµēŌ“OFFŹ± ĒėĻČ¹Ų±ÕøŗŌŲ»ņøŗŌŲĻßĀ·µÄµēŌ“£¬·ńŌņŌŚ¹Ų±ÕµēŌ“Ź±»į·¢ÉśŹä³öĀö³å”£ ¹ŲÓŚµēŌ“µÄÖÖĄą ²»ÄÜŹ¹ÓĆĪŽĘ½»¬µÄČ«²ØÕūĮ÷”¢°ė²ØÕūĮ÷µēŌ“”£ ¹ŲÓŚĻą»„øÉČÅ Ļą»„øÉČÅ£¬ŹĒÖøŹÜµ½ĻąĮŚ“«øŠĘ÷µÄ¹āµÄÓ°Ļģ£¬·¢ÉśŹä³ö²»ĪȶØדĢ¬µÄĻÖĻó”£ ŅŌĻĀŹĒ±ÜĆāĻą»„øÉČŵķ½·Ø”£
| ¶Ō²ß | Ė¼æ¼·½·Ø | ¶ŌÉäŠĶ | ·“ÉäŠĶ |
| 1 | Ź¹ÓĆ“ų·ĄÖ¹øÉČŹ¦Äܵē«øŠĘ÷”£ |
ŌŚŠčŅŖ½ōĆÜÅÅĮŠ°²×°“«øŠĘ÷Ź±£¬ĒėŹ¹ÓĆø½“ų·ĄÖ¹Ļą»„øÉČŹ¦Äܵē«øŠĘ÷”£ “«øŠĘ÷ĪŖ10øöŅŌÄŚ¹āĻĖŹ½“«øŠĘ÷E3X-DA”õ-S”¢E3X-MDA”¢ E3C-LDA µ«ŹĒ£¬øł¾ŻĢõ¼ž²»Ķ¬¶ųÓŠĖł²īŅģ£¬Ēė²ĪÕÕ”śµŚ68”¢108Ņ³”£ 5øöŅŌÄŚ¹āĻĖŹ½“«øŠĘ÷E3X-NA 2øöŅŌÄŚ·Å“óĘ÷ÄŚÖĆ¹āµē£Ø¶ŌÉäŠĶ³żĶā£©E3T”¢E3Z”¢E3S-C”¢E3G-L1/L3”¢ ·Å“óĘ÷·ÖĄė¹āµēE3C |
|
| 2 | °²×°·ĄÖ¹øÉČŵĹżĀĖĘ÷”£ |
Ö»ĶعżŹ¹ÓĆŠĶŗÅE3Z-TA·ĄÖ¹Ļą»„øÉČÅĘ«¹ā¹żĀĖĘ÷£¬¾ĶæɽųŠŠ½ōĆÜ°²×°”£ £Ø**¶ą2ĢØ£© ·ĄÖ¹Ļą»„øÉČÅĘ«¹ā¹żĀĖĘ÷ŠĶŗÅ£ŗE39-E11 |
££ |
| 3 | Ö»øōæŖµ½²»·¢ÉśøÉČŵľąĄė”£ | Ēėøł¾ŻŃł±¾ÄæĀ¼Č·ČĻĘ½ŠŠŅĘ¶Æ¾ąĄėĢŲŠŌ·¶Ī§£¬Č·ČĻĻąĮŚ“«øŠĘ÷¼äµÄÉč¶Ø¾ąĄė£¬ĒėŌŚĘ½ŠŠŅĘ¶Æ¾ąĄėĢŲŠŌ·¶Ī§µÄŌ¼1.5±¶ŅŌÉĻ½ųŠŠÉčÖĆ”£ |
µ±¹¤¼žÓÉŌ¶¼°½üŅĘ¶ÆŹ±£¬ŅņĪŖŌŚ¶Æ×÷µćĒ°ŗóæÉÄÜ»įŅżĘšŹä³öÕšµ“£¬ĖłŅŌŌŚ½ųŠŠŅŌÉĻÓ¦ÓĆŹ±£¬Ēė½«“«øŠĘ÷¼äÉč¶ØĪŖ¶Æ×÷ĒųÓņ·¶Ī§Éč¶ØŌŚ1.5±¶ŅŌÉĻ”£
|
| < align="center">4 | Ķ¶¹āĘ÷ÓėŹÜ¹āĘ÷Ļą»„²¢ĮŠ”£ |
ĶعżĶ¶ŹÜ¹āĘ÷µÄ¼äøōÅäÖĆ£¬æÉŅŌ½ųŠŠ½ōĆÜ°²×°”££Ø**¶ą2ĢØ£© µ«ŹĒ£¬¼ģ²ā¹¤¼ž½Ó½ü¹āµēæŖ¹ŲŹ±£¬æÉÄÜ»įŹÜµ½ĻąĮŚĶ¶¹āĘ÷µÄ¹ā£¬¶ų³ÉĪŖČė¹āדĢ¬”£ 
|
££ |
| 5 | “ķæŖ¹āÖį |
µ±ŹÜ¹āĘ÷ÓŠæÉÄ܏ܵ½Ą“×ŌĘäĖū“«øŠĘ÷µÄČė¹āŹ±£¬ĪŖĮĖ·ĄÖ¹ĘäĖū“«øŠĘ÷µÄ¹ā£¬ĒėøıäĶ¶¹āĘ÷ŗĶŹÜ¹āĘ÷µÄĪ»ÖĆ£¬ÉčÖĆÕŚ¹ā°åµČ”£ £ØŅņĪŖ¼“Ź¹øōæŖ¼ģ²ā¾ąĄėŅŌÉĻ£¬Ņ²æÉÄÜ»įÓŠČė¹ā£© |
½«“«øŠĘ÷Ļą¶Ō°²×°Ź±£¬Ēė°“ĻĀĶ¼ĖłŹ¾½ųŠŠĒ抱°²×°”££ØŅņĪŖ¼“Ź¹ĄėæŖ“«øŠĘ÷µÄ¼ģ²ā¾ąĄėŅŌĶā£¬Ņ²»įŹÜµ½Ļą»„Ó°Ļģ¶ųŅżĘšŹä³öÕšµ“£© |
| 6 | µ÷ÕūĮéĆō¶Č | Ņ»°ćĒéæöĻĀĶعżµ÷µĶĮéĆō¶ČæɵƵ½øÄÉĘ”£ | |
¹ŲÓŚøÉČÅ øł¾ŻøÉČŵIJ»Ķ¬ĒÖČėĀ·¾¶”¢ĘµĀŹ³É·Ö”¢²Ø·åÖµµČ²ÉČ”²»Ķ¬µÄ¶Ō²ß”£“ś±ķŠŌŹ¾ĄżČēĻĀĖłŹ¾”£
| øÉČŵÄÓ°Ļģ | øÉČÅĒÖČėĀ·¾¶¼°¶Ō²ß | |
| ¶Ō²ßĒ° | ¶Ō²ßŗó | |
|
¹²ĶØÄ£Ź½øÉČţر任Ę÷øÉČÅ£© ·Ö±šŹ©¼ÓŌŚ£«VĻßĀ·”¢OVĻßĀ·Óė°²×°ĢØÖ®¼äµÄøÉČÅ |
“ÓøÉČÅŌ“¾¹ż°²×°ĢأؽšŹō£©ĒÖČė”£
|
¢Ł½«±äʵĘ÷µē»ś½ÓµŲ”££ØDÖÖ½ÓµŲ£© ¢Ś½«øÉČÅŌ“ÓėµēŌ“£Ø0V²ą£©½ųŠŠµēČŻĘ÷½ÓµŲ”£ £Ø±”ĤµēČŻĘ÷0.22 ¦Ģ F 630V£© ¢ŪŌŚµēČŻĘ÷Óė°²×°ĢأؽšŹō£©Ö®¼ä²åČė¾ųŌµĢ唣 £ØĖÜĮĻ”¢Ļš½ŗµČ£© 
|
|
·ųÉäøÉČÅ øßʵĀŹµÄµē“Å²Ø Ö±½ÓĒÖČė“«øŠĘ÷ÄŚ²æŗĶµēŌ“ĻßĀ·µČ |
“ÓøÉČÅŌ“ĶعżæÕĘų“«²„Ö±½ÓĒÖČė“«øŠĘ÷”£
|
|
| µēŌ“ĻßøÉČÅøßŃ¹Ļß·¢³öµÄµē“ÅøŠÓ¦ŗĶæŖ¹ŲµēŌ“·¢³öµÄæŖ¹ŲøÉČŵČĒÖČė |
“ÓøÉČÅŌ“ĶعżæÕĘų“«²„Ö±½ÓĒÖČė“«øŠĘ÷”£ 
|
|
”ń“«øŠĘ÷²¼Ļߏ± ¹ŲÓŚµ¼Ļß Ī“¼ĒĀ¼µ¼ĻßŃÓ³¤µÄ³¤¶ČµÄĒéæöĻĀ£¬²ÉÓĆ0.3mm2ŅŌÉĻµÄµ¼Ļߣ¬ĒŅŌŚ100mŅŌÄŚ”£ĘäĖūĒéæöŌŚø÷ÉĢĘ·µÄ”ø ĒėÕżČ·Ź¹ÓĆ ”¹ÖŠÓŠĖł¼ĒŌŲ”£ ¹ŲÓŚµ¼ĻߵĥÉģĒæ¶Č ²¼Ļߏ±Ēė²»ŅŖ³¬¹żĻĀ±ķĖłŹ¾µÄĮ¦”£
| µ¼ĻßÖ±¾¶ | ĄÉģĮ¦ |
| Š”ÓŚ ¦Õ 4 | 30NŅŌĻĀ |
| “óÓŚ ¦Õ4 | 50NŅŌĻĀ |
Ķ¬Ź±£¬Ēė²»ŅŖŌŚĘĮ±ĪĻß”¢Ķ¬ÖįĻßÉĻŹ©¼ÓĄÉģĮ¦ ¹ŲÓŚ·“ø“ĶäĒśŹ¹ÓĆ Ķس£“«øŠĘ÷µÄµ¼Ļß²»ÄÜ·“ø“ĶäĒśŹ¹ÓĆ”££Ø¹ŲÓŚÄĶĶäĒśŠŌµ¼Ļߣ¬Ēė²Ī¼ūÓėæɶƲæµÄ°²×°Ņ³”ø ÓėæɶƲæµÄ°²×° ”¹£©”£ ¹ŲÓŚÓėøßµēŃ¹µÄĒų±š£Ø²¼Ļß·½·Ø£© ČēŌŚĶ¬Ņ»Åä¹Ü”¢Ķ¬Ņ»²ŪÄŚ½ųŠŠøßŃ¹Ļß”¢¶ÆĮ¦ĻßÓė¹āµē“«øŠĘ÷µÄ²¼Ļߣ¬ŌņæÉÄÜŅņøŠÓ¦¶ųµ¼ÖĀĪó¶Æ×÷»ņĘĘĖš”£ŌŌņÉĻĒėŹ¹ÓĆĘäĖūĻßĀ·²¼Ļß»ņµ„¶Ą½šŹōÅä¹Ü»ņĘĮ±Īµ¼Ļß”£
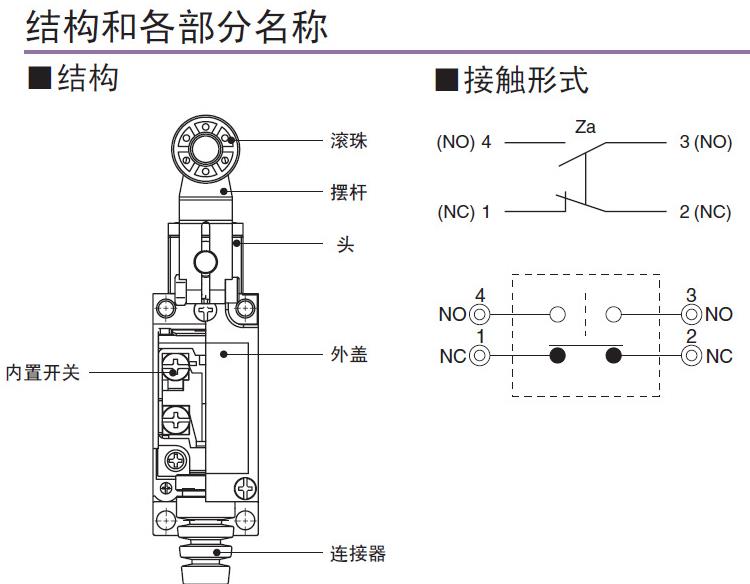
¹ŲÓŚĪ“²¼ĻßµÄŅżĻß“¦Ąķ Ź¹ÓĆ×ŌĪŅÕļ¶ĻŹä³ö¹ęøńµÄ»śŠĶµČÖŠ£¬ĒėĒŠ¶Ļ²»Ź¹ÓƵĵ¼Ļߣ¬°üÉĻ¾ųŌµ“ųµČ£¬Ź¹Ęä²»ÓėĘäĖū¶Ė×Ó½Ó“„”£ ¹ŲÓŚ“«øŠĘ÷µēŌ“ Ź¹ÓĆŹŠŹŪµÄæŖ¹Ųµ÷ÕūĘ÷Ź±£¬Ēė½«FG£Ø»ś¼Ü½ÓµŲ¶Ė×Ó£©¼°G£Ø½ÓµŲ¶Ė×Ó£©½ųŠŠ½ÓµŲ”£ Ēė×¢Ņā£¬Čē²»½ųŠŠ½ÓµŲ£¬æÉÄÜŅņµēŌ“µÄæŖ¹ŲøÉČŶųµ¼ÖĀĪó²Ł×÷”£ “«øŠĘ÷æŲÖĘĘ÷””ÓėS3D2µÄĮ¬½ÓŹ¾Ąż Ö±Į÷3Ļߏ½NPNŹä³öŠĶ S3D2µÄŠÅŗÅŹäČėĒŠ»»æŖ¹ŲæɽųŠŠ¶Æ×÷µÄ·“×Ŗ”£
”ń“«øŠĘ÷°²×°Ź± ÓėæɶƲæµÄ°²×° ¶Ō»śŠµŹÖµČæɶƲæ½ųŠŠ¹āµē“«øŠĘ÷µÄ°²×°Ź±£¬ĒėĢÖĀŪŹ¹ÓĆÄĶĶäĒśŠŌµ¼ĻߣػśŠµŹÖµ¼Ļߣ©µÄ»śŠĶ”£ ÄĶĶäĒś“ĪŹż±ź×¼µ¼ĻߣŗĻą¶ŌÓŚŌ¼1.3Ķņ“Ī »śŠµŹÖµ¼ĻߣŗŌ¼50Ķņ“ĪĪŖÓÅĮ¼”£ µ¼ĻßµÄĶäĒśĘĘ»µŹŌŃé£ØĒæČĶ¶Č¶ĻĻߏŌŃ飩: Ņ»±ßĶصē£¬Ņ»±ß·“ø“”øĶäĒś”¹£¬¼ģ²āµ½µēĮ÷±»ĒŠ¶ĻĪŖÖ¹µÄ”øĶäĒś“ĪŹż”¹”£
| ²āŹŌ²ÄĮĻ | ±ź×¼¾ųŌµĻß VR(H)3”Į18/0.12 |
»śŠµŹÖµ¼Ļß ĒæČĶµ¼Ģåµ¼Ļß 2”Į0.15mm2ĘĮ±Ī |
|
| ŹŌŃé | |||
| ÄŚČŻĢõ¼ž | ĶäĒś½Ē¶Č(¦Č) | ×óÓŅø÷90”ć | ×óÓŅø÷45”ć |
| ĶäĒś“ĪŹż | ££ | 60“Ī/min | |
| øŗÖŲ | 300g | 200g | |
| ĶäĒś1“ĪµÄ ¶Æ×÷ | Ķ¼¢Ł”«¢ŪĪŖ1“Ī | Ķ¼¢Ł”«¢ŪĪŖ1“Ī | |
| Ö§µćµÄĒśĀŹ °ė¾¶(R) | 5mm | 2.5mm | |
| ½į¹ū | Ō¼13,000“Ī | Ō¼500,000“Ī | |
ĶäĒś½Ē¶Č”¢øŗÖŲ”¢Ö§µćµÄĒśĀŹ°ė¾¶µČ£¬±ź×¼µ¼ĻßÓė»śŠµŹÖµ¼ĻߵďŌŃéĢõ¼ž²»Ķ¬”£Źµ¼ŹŹ¹ÓĆĢõ¼žĻĀµÄÄĶĶäĒśŠŌÄÜ£¬Ēė²Īæ¼ÉĻ±ķ¼ĒĀ¼µÄŹżÖµ”£ ¹ŲÓŚ“«øŠĘ÷¹āĻĖµÄ¹Ģ¶Ø E3X¹āĻĖ·Å“óĘ÷µ„ŌŖ²ÉÓƵ„“„Ź½Ėų¶Ø·½Ź½”£ĒėÓĆŅŌĻĀ·½·Ø½ųŠŠ¹āĻĖµÄ°²×°¼°²šŠ¶”£ ¢Ł“«øŠĘ÷¹āĻĖµÄ°²×° ĢįĘš±£»¤øĒ£¬½«¹āĻĖ°“·Å“óĘ÷µ„ŌŖ²ąĆęµÄ²åČėĪ»ÖƱź¼Ē²åČėŗ󣬷ÅĻĀĖųøĖ”£ 
”“Ź¹ÓĆø½¼žE39-F9µÄ¹āĻĖ”µ
”“²»æÉĖęŅāĒŠøī£Ø“ųĢ׹ܣ©µÄ¹āĻĖ”µ
¢Ś“«øŠĘ÷¹āĻĖ²šŠ¶ ĢįĘš±£»¤øĒ£¬ĢįĘšĖųøĖ£¬¼“æÉĄ³ö¹āĻĖ”£
ĪŖĮĖ±£³Ö¹āĻĖµÄĢŲŠŌ£¬ĒėĻČČ·ČĻĖų¶ØŹĒ·ńŅŃ½Ó“„£¬ŌŁ°Ī³ż¹āĻĖ”£ ĒėŌŚ£10”«£«40”ęµÄĪĀ¶Č·¶Ī§ÄŚ½ųŠŠ¹āĻĖµÄĖų¶Ø”¢Ėų¶Ø½ā³ż”£ ”ńµ÷ÕūŹ± ¹ŲÓŚ¹āÖįµ÷Õū ½«¹āµēæŖ¹ŲÉĻĻĀ×óÓŅŅĘ¶Æ£¬½«ĘäÉč¶ØŌŚ¶Æ×÷ĻŌŹ¾µĘĮĮ£Ø»ņµĘĆš£©µÄ·¶Ī§ÖŠŃė”£“ĖĶā£¬ŌŚE3S-CÖŠ£¬ÓÉÓŚ¹āÖįÓė»śŠµÖįŗĻ²¢ŌŚŅ»Ęš£¬ĖłŅŌ°²×°Ź±Ö»Šč¶ŌÕÕ»śŠµÖį£¬±ćÄܶŌ¹āÖį½ųŠŠ¼ņµ„µ÷Õū”£ 
¹āÖį £ŗ Ķ¶¹āĘ÷ÖŠĮ¬½ÓĶø¾µÖŠŠÄŗĶĶ¶¹ā¹āŹųÖŠŠÄµÄÖį½Š¹āÖį”£ŹÜ¹āĘ÷µÄ¹āÖįŹĒĮ¬½ÓĶø¾µÖŠŠÄŗĶŹÜ¹āĒųÓņÖŠŠÄµÄÖį”£»śŠµÖį £ŗ “ÓĶø¾µÖŠŠÄ“¹Ö±Éģ³öµÄÖį³ĘĪŖ»śŠµÖį”£
”ńŹ¹ÓĆ»·¾³ ¹ŲÓŚÄĶĖ®ŠŌ Ēė±ÜĆāŌŚĖ®ÖŠ”¢½µÓźŹ±¼°ŹŅĶāŹ¹ÓĆ”£ ¹ŲÓŚ»·¾³ °²×°ŌŚŅŌĻĀ³”ĖłŹ±£¬»įŅżĘšĪó¶Æ×÷ŗĶ¹ŹÕĻ£¬ĖłŅŌĒė±ÜĆāŹ¹ÓĆ”£ ¢Ł³¾°£¶ąµÄ³”Ėł”£ ¢ŚŃō¹āÖ±½ÓÕÕÉäµÄ³”Ėł”£ ¢Ū²śÉśøÆŹ“ŠŌĘųĢåµÄ³”Ėł”£ ¢Ü½Ó“„µ½ÓŠ»śČܼĮµČµÄ³”Ėł”£ ¢ŻÓŠÕń¶Æ?³å»÷µÄ³”Ėł”£ ¢ŽÖ±½Ó½Ó“„µ½Ė®”¢ÓĶ”¢Ņ©Ę·µÄ³”Ėł”£ ¢ßŹŖ¶Čøߣ¬æÉÄÜ»į½įĀ¶µÄ³”Ėł”£ ÄĶ»·¾³ŠĶ“«øŠĘ÷£Ø·śŹ÷Ö¬ŠĶ£© E32-T11F/T12F/T14F/T81F-S/D12F/D82F”¢E3HQµČŌŚÉĻŹö¢Ū”¢¢ŽĢõ¼žĻĀŅ²æÉŹ¹ÓĆ”£ ±¬ÕØŠŌ»·¾³ĻĀµÄ¹āĻĖŹ½¹āµē“«øŠĘ÷ æɽ«¹āĻĖµ„ŌŖÉčÖĆŌŚĪ£ĻÕ³”Ėł£¬½«·Å“óĘ÷µ„ŌŖÉčÖĆŌŚ·ĒĪ£ĻÕ³”Ėł½ųŠŠŹ¹ÓĆ ”“ĄķÓÉ”µ µēĘųÉč±øµÄ±¬ÕØ»ņ»šŌֵķ¢Éś£¬±Ų¶ØŹĒŅņĪŖĶ¬Ź±“ęŌŚĪ£ĻÕ»·¾³ŗĶ»šŌ“”£ÓÉÓŚ¹āÄܲ»»į³ÉĪŖ»šŌ“£¬ĖłŅŌ²»»įŅżĘš±¬ÕØŗĶ»šŌÖ”£ µ«ŹĒ£¬ÓÉÓŚĶø¾µ”¢±¾ĢåĶāæĒ”¢¹āĻĖµÄ°ü²ćµČŹ¹ÓƵďĒĖÜĮĻ£¬Õ“ÉĻČܼĮŗó»įŌģ³ÉøÆŹ“»ņĮӻƣØÄ£ŗżµČ£©£¬ĖłŅŌ²»ÄÜŹ¹ÓĆ”£ ”“»šŌ“”µ ŹĒÖøŌŚĪ£ĻÕ³”Ėł£¬“ųÓŠÄÜŅżĘš±¬ÕصÄÄÜĮæµÄµē»š»ØŗĶøßĪĀ²æ”£
Ķā²æµē½ēµÄÓ°Ļģ ĪŽĻßµēŹÕ·¢»śŌŚ½Ó½ü¹āµē“«øŠĘ÷¼°Ęä²¼Ļßø½½üŹ±£¬ÓŠæÉÄÜ»įŅżĘšĪó¶Æ×÷£¬ĖłŅŌ½ūÖ¹½Ó½ü”£ ”ń±£ŃųÓė¼ģ²é ²»¶Æ×÷Ź±µÄČ·ČĻĻīÄæ ²»¶Æ×÷Ź±£¬ĒėČ·ČĻŅŌĻĀ¼øµć: ¢ŁŹĒ·ń°“¹ę¶Ø½ųŠŠ²¼Ļß¼°Į¬½Ó”£ ¢ŚĀŻ¶¤ŹĒ·ńÓŠĖɶƔ£ ¢Ū¹āÖįµ÷Õū”¢ĮéĆō¶Čµ÷ÕūŹĒ·ńŅŃĶź³É”£ ¢Ż¼ģ²āĪļĢ唢¹¤¼žĖŁ¶ČŹĒ·ń·ūŗĻ¶ī¶Ø¹ęøń”£ ¢ŻĶ¶ŹÜ¹āĘ÷µÄĶø¾µĆęÉĻŹĒ·ńø½×ÅÓŠĄ¬»ų”¢»Ņ³¾µČŅģĪļ”£ ¢ß**²»ÄÜ·Ö½ā”¢ŠŽĄķ”£ ¹ŲÓŚĶø¾µĶāæĒ ¹āµē“«øŠĘ÷µÄĶø¾µĶāæĒ»ł±¾ÉĻŹĒĖÜĮĻµÄ”£ĒėÓĆøɲ¼ĒįĒį²ĮŹĆĪŪ×Õ”£Ēė²»ŅŖŹ¹ÓĆĻ”ŹĶ¼ĮµČÓŠ»śČܼĮ”£ E3S-CµÄĶāæĒŹĒ½šŹōµÄ£¬Ķø¾µŹĒĖÜĮĻµÄ”£ ”ń“«øŠĘ÷ø½¼ž ·“Éä°å£ØE39-R3/R37/RS1/RS2/RS3£©
¹ŲÓŚŹ¹ÓĆŹ± ¢ŁŹ¹ÓĆÄŚ²ąÕ³“ųŹ±£¬ĒėĻČ½«Ź¹ÓĆ³”Ėłø½×ŵÄÓĶ?»Ņ³¾µČÓĆĒåĻ“¼ĮµČĒåĻ“øɾ»ŗóŌŁÕ³Ģł”£ČēÓŠ²ŠĮōÓĶĪŪ£¬½«ĪŽ·Ø°²×°”£ ¢ŚE39-RS1/RS2/RS3Ēė²»ŅŖÓĆ½šŹōŗĶÖø¼×µČÓĆĮ¦°“Ń¹”£·ńŌņ»įŅżĘš¹¦ÄܵÄĮӻƔ£ ¢ŪĒė²»ŅŖŌŚČŻŅ×½Ó“„µ½ÓĶŗĶŅ©Ę·µÄ³”ĖłŹ¹ÓĆ”£ ¹ŲÓŚM8”¢M12½Ó²å¼ž
ĒėĪń±ŲŌŚĒŠ¶ĻµēŌ“ŗó½ųŠŠ½Ó²å¼žµÄ²å°Ī”£
ĒėĪń±ŲÄĆ×”½Ó²å¼žøĒµÄ²æ·Ö½ųŠŠ½Ó²å¼žµÄ²å°Ī”£
¹Ģ¶Ø¹¤¾ßŅŖÓĆŹÖĄ“½ō¹Ģ”£ČēŹ¹ÓĆĒÆ×ÓµČ£¬Ōņ»įŌģ³ÉĘĘĖš”£
Čē¹ū½ō¹Ģ²»³ä·Ö£¬ÓŠŹ±»įŅņÕń¶Æ¶ųµ¼ÖĀĖɶƣ¬±£»¤¹¹Ōģ½«ĪŽ·Ø·¢»ÓŠ§ÓĆ”£
”ńĘäĖū “ś±ķŹ¾ĄżµÄ¼ĒŌŲŹżÖµ “ś±ķĄżÖŠĖł¼ĒŌŲµÄø÷ÖÖŹż¾Ż”¢ŹżÖµ²»sŹĒ×÷ĪŖ”ø¶ī¶ØÖµ.ŠŌÄÜ”¹Ą“½ųŠŠ±£ÕĻµÄŹżÖµ£¬¶ųŹĒijøöÅśĮæÖŠČĪŅā³éČ”µÄŃłÖµ£¬ĖłŅŌĒė×÷ĪŖ²Ī漵ıź×¼½ųŠŠŹ¹ÓĆ”£”ø**Š”¼ģ²āĪļĢ唹”øø÷ÖÖĢŲŠŌŹż¾Ż”¹”ø¶Ī²ī¼ģ²āŹż¾Ż”¹”ø²»Ķ¬¹ęøńµÄŃ”ŌńŅ»ĄĄ±ķ”¹µČ¶¼ŹĒ“ś±ķĄżµÄ¶ŌĻó”£ ¹ŲÓŚĒåÉØ
ÓŠ»śČܼĮ»įøÆŹ“²śĘ·±ķĆę£¬ĖłŅŌĒėĪšŹ¹ÓĆ”£
ĒėÓĆČįČķµÄøɲ¼½ųŠŠĒåÉØ”£
| ON ¼ĢµēĘ÷ | OMRON ¹āµēæŖ¹Ų | OMRON ½Ó½üæŖ¹Ų | OMRON ŹżĻŌĪĀæŲĘ÷ | |||
| MY2N-J ³£ÓƵēŃ¹ | E3Z-D61 | E2E-CR8B1 | E5CSL-RTC | |||
| MY4N-J ³£ÓƵēŃ¹ | E3Z-D62 | E2E-X1R5E1 | E5CSL-QTC | |||
| MY2N-J ĢŲŹāµēŃ¹ | E3Z-R61 | E2E-X2D1-N | E5CWL-R1TC | |||
| MY4N-J ĢŲŹāµēŃ¹ | E3Z-T61 | E2E-X3D1-N | E5CWL-Q1TC | |||
| OMRON Ō²ÖłŠĶ18“ó¹āµē | E3Z-D81 | E2E-X2E1 | E5CC-RX2ASM-800 | |||
| E3FA-DN11 | E3Z-D82 | E2E-X5ME1 | E5CC-RX2ASM-820 | |||
| E3FA-DN12 | E3Z-T61A | E2E-X7D1-N | E5CC-RX2ASM-802 | |||
| E3FA-DN13 | E3Z-LS61 | E2E-X5MY1 | E5CC-QX2ASM-820 | |||
| E3FA-DN14 | E3JM-DS70M4-G | E2E-X10MY1 | E5CC-QX2ASM-802 | |||
| E3FA-DN15 | E3JM-R4M4-G | TL-Q5MC1-Z | E5CC-QX2ASM-800 | |||
| MKS2P AC220V | E3JM-10M4-G | TL-N10ME1 | E5EC-RR2ASM-800 | |||
| MKS2P DC24V | E3JK-DR11-C | TL-N20ME1 | E5EC-RR2ASM-820 | |||
| MKS3P AC220V | E3JK-DR12-C | OMRON ¼ĘŹżĘ÷ | E5EC-Q2ASM-800 | |||
| MKS3P DC24V | E3JK-TR12-C | H7EC-N | E5AC-RX2ASM-800 | |||
| E3JK-RR12-C | H7EC-NV | E5CZ-Q2MT | ||||
| OMRON µ×׳ | OMRON Š”ŠĶ¹āµēæŖ¹Ų | OMRON Ź±¼ä¼ĢµēĘ÷ | OMRON ŠŠ³ĢæŖ¹Ų | |||
| PYF08A-E | EE-SX670 671 672 | H3Y-2 0-60S DC24V | HL-5200 | |||
| PYF14A-E | EE-SPY412 | H3Y-2 0-60S AC220V | HL-5030 | |||
| P2CF-11 | EE-SX673 EE-SX674 | H3Y-4 0-60S DC24V | HL-5050 | |||
| P2CF-08 | EE-SPY311 | H3Y-4 0-60S AC220V | HL-5100 | |||
| PTF08A-E | EE-SX670 671-WR | H3BA-N8H DC24V AC220 | D4V-8108SZ-N | |||
| P2RF-05-E | EE-SX672- 673-WR | H3BA-N8H AC110V | D4V-8104SZ | |||
| P2RF-08-E | EE-SPX613 | H3BA-N DC24 AC220 | SHL-D55 | |||
| AP-B | EE-SPW421 | H5CN-XAN-Z AC220V | SHL-W255 | |||
| OMRON ¹āĻĖ·Å“óĘ÷ | EE-SPY301 | H5CX-A-N AC100-240 | SHL-Q2255 | |||
| E3X-NA11 | EE-SPY302 | H3CA-8 AC220V | WLCA12-Q | |||
| E3X-ZD11 | EE-SPY401 | H3CA-8H AC220V DC24 | WLCA12-2N-Q/N | |||
| E3X-ZD41 | EE-SPY402 | 61F-GP-N AC220V | WLCA12-2-Q/N | |||
| E3X-HD11 | EE-SPX303N | 61F-GP-N8 AC220V | WLCA2-2-Q/N | |||
| E3X-HD10 | EE-1006 | 61F-G | WLCA2-2N-Q/N | |||
| E3X-DA11-S | EE-1010 | 61F-G3 | WLD2-Q | |||
| OMRON ±ąĀėĘ÷ | OMRON ±ąĀėĘ÷ | OMRON ±ąĀėĘ÷ | WLNJ-Q | |||
| E6B2-CWZ6C 360P | E6B2-CWZ6C 1000P | E6CP-AG5C-C 256 2M | Z-15GW2-B | |||
| E6B2-CWZ6C 600P | E6B2-CWZ6C 2000P | E6B2-CWZ1X 2000P/R 2M | Z-15GW22-B | |||
½Ó½ü“«øŠĘ÷
Ņ»”¢½Ó½üæŖ¹ŲŹĒŹ²Ć“ ½Ó½üæŖ¹ŲŌĄķ
½Ó½üæŖ¹ŲŅ²ŹĒŅ»ÖÖæŖ¹Ų”£½Ó½üæŖ¹ŲŹĒŅ»ÖÖĪŽŠčÓėŌĖ¶Æ²æ¼ž½ųŠŠ»śŠµÖ±½Ó½Ó“„¶ųæÉŅŌ²Ł×÷µÄĪ»ÖĆæŖ¹Ų£¬µ±ĪļĢå½Ó½üæŖ¹ŲµÄøŠÓ¦Ćęµ½¶Æ×÷¾ąĄėŹ±£¬²»ŠčŅŖ»śŠµ½Ó“„¼°Ź©¼ÓČĪŗĪŃ¹Į¦¼“æÉŹ¹æŖ¹Ų¶Æ×÷£¬“Ó¶ųĒż¶ÆÖ±Į÷µēĘ÷»ņøų¼ĘĖ滜£Øplc)×°ÖĆĢį¹©æŲÖĘÖøĮī”£½Ó½üæŖ¹ŲÓÖ³ĘĪŽ“„µć½Ó½üæŖ¹Ų£¬ŹĒĄķĻėµÄµē×ÓæŖ¹ŲĮæ“«øŠĘ÷”£µ±½šŹō¼ģ²āĢå½Ó½üæŖ¹ŲµÄøŠÓ¦ĒųÓņ£¬æŖ¹Ų¾ĶÄÜĪŽ½Ó“„£¬ĪŽŃ¹Į¦”¢ĪŽ»š»Ø”¢ŃøĖŁ·¢³öµēĘųÖøĮī£¬×¼Č··“Ó¦³öŌĖ¶Æ»ś¹¹µÄĪ»ÖĆŗĶŠŠ³Ģ”£
½Ó½üæŖ¹ŲŌĄķ¾ĶŹĒ°ŃŅ»æéĶØÓŠµēĮ÷µÄ½šŹō»ņ°ėµ¼Ģå±”Ę¬“¹Ö±µŲ·ÅŌŚ“ų”ÖŠ£¬±”ʬµÄĮ½¶Ė¾Ķ»į²śÉśµēĪ»²ī£¬Ķعż“ĖÖÖŌĄķĄ“æŲÖĘæŖŗĶ¹Ų”£
ŅņĪŖĪ»ŅĘ“«øŠĘ÷æÉŅŌøł¾Ż²»Ķ¬µÄŌĄķŗĶ²»Ķ¬µÄ·½·Ø×ö³É£¬¶ų²»Ķ¬µÄĪ»ŅĘ“«øŠĘ÷¶ŌĪļĢåµÄ”°øŠÖŖ”±·½·ØŅ²²»Ķ¬£¬ĖłŅŌ³£¼ūµÄ½Ó½üæŖ¹ŲÓŠŅŌĻĀ¼øÖÖ£ŗ
ĪŠĮ÷Ź½½Ó½üæŖ¹Ų”¢µēČŻŹ½½Ó½üæŖ¹Ų”¢»ō¶ū½Ó½üæŖ¹Ų”¢¹āµēŹ½½Ó½ųæŖ¹Ų”¢ČČŹĶµēŹ½½Ó½üæŖ¹Ų”¢ĘäĖüŠĶŹ½µÄ½Ó½üæŖ¹Ų
””3”¢»ō¶ū½Ó½üæŖ¹Ų
»ō¶ūŌŖ¼žŹĒŅ»ÖÖ“ÅĆōŌŖ¼ž”£ĄūÓĆ»ō¶ūŌŖ¼ž×ö³ÉµÄæŖ¹Ų£¬½Š×ö»ō¶ūæŖ¹Ų”£µ±“ÅŠŌĪļ¼žŅĘ½ü»ō¶ūæŖ¹ŲŹ±£¬æŖ¹Ų¼ģ²āĆęÉĻµÄ»ō¶ūŌŖ¼žŅņ²śÉś»ō¶ūŠ§Ó¦¶ųŹ¹æŖ¹ŲÄŚ²æµēĀ·×“Ģ¬·¢Éś±ä»Æ£¬ÓÉ“ĖŹ¶±šø½½üÓŠ“ÅŠŌĪļĢå“ęŌŚ£¬½ų¶ųæŲÖĘæŖ¹ŲµÄĶØ»ņ¶Ļ”£ÕāÖÖ½Ó½üæŖ¹ŲµÄ¼ģ²ā¶ŌĻó±ŲŠėŹĒ“ÅŠŌĪļĢå
4”¢¹āµēŹ½½Ó½üæŖ¹Ų
””ĄūÓĆ¹āµēŠ§Ó¦×ö³ÉµÄæŖ¹Ų½Š¹āµēæŖ¹Ų”£½«·¢¹āĘ÷¼žÓė¹āµēĘ÷¼ž°“Ņ»¶Ø·½Ļņ×°ŌŚĶ¬Ņ»øö¼ģ²āĶ·ÄŚ”£µ±ÓŠ·“¹āĆę£Ø±»¼ģ²āĪļĢ壩½Ó½üŹ±£¬¹āµēĘ÷¼ž½ÓŹÕµ½·“Éä¹āŗó±ćŌŚŠÅŗÅŹä³ö£¬ÓÉ“Ė±ćæÉ”°øŠÖŖ”±ÓŠĪļĢå½Ó½ü”£
5”¢ČČŹĶµēŹ½½Ó½üæŖ¹Ų
ÓĆÄÜøŠÖŖĪĀ¶Č±ä»ÆµÄŌŖ¼ž×ö³ÉµÄæŖ¹Ų½ŠČČŹĶµēŹ½½Ó½üæŖ¹Ų”£ÕāÖÖæŖ¹ŲŹĒ½«ČČŹĶµēĘ÷¼ž°²×°ŌŚæŖ¹ŲµÄ¼ģ²āĆęÉĻ£¬µ±ÓŠÓė»·¾³ĪĀ¶Č²»Ķ¬µÄĪļĢå½Ó½üŹ±£¬ČČŹĶµēĘ÷¼žµÄŹä³ö±ć±ä»Æ£¬ÓÉ“Ė±ćæɼģ²ā³öÓŠĪļĢå½Ó½ü”£
6”¢ĘäĖüŠĶŹ½µÄ½Ó½üæŖ¹Ų
µ±¹Ū²ģÕß»ņĻµĶ³¶Ō²ØŌ“µÄ¾ąĄė·¢Éśøı䏱£¬½Ó½üµ½µÄ²ØµÄʵĀŹ»į·¢ÉśĘ«ŅĘ£¬ÕāÖÖĻÖĻó³ĘĪŖ¶ąĘÕĄÕŠ§Ó¦”£ÉłÄÉŗĶĄ×“ļ¾ĶŹĒĄūÓĆÕāøöŠ§Ó¦µÄŌĄķÖĘ³ÉµÄ”£ĄūÓƶąĘÕĄÕŠ§Ó¦æÉÖĘ³É³¬Éł²Ø½Ó½üæŖ¹Ų”¢Ī¢²Ø½Ó½üæŖ¹ŲµČ”£µ±ÓŠĪļĢåŅĘ½üŹ±£¬½Ó½üæŖ¹Ų½ÓŹÕµ½µÄ·“ÉäŠÅŗÅ»į²śÉś¶ąĘÕĄÕʵŅĘ£¬ÓÉ“ĖæÉŅŌŹ¶±š³öÓŠĪŽĪļĢå½Ó½ü”£
””””¼ģ²āµēĢŻ”¢Éż½µÉč±øµÄĶ£Ö¹”¢Ęš¶Æ”¢ĶعżĪ»ÖĆ£»¼ģ²ā³µĮ¾µÄĪ»ÖĆ£¬·ĄÖ¹Į½ĪļĢåĻą×²¼ģ²ā£»¼ģ²ā¹¤×÷»śŠµµÄÉč¶ØĪ»ÖĆ£¬ŅĘ¶Æ»śĘ÷»ņ²æ¼žµÄ¼«ĻŽĪ»ÖĆ£»¼ģ²ā»Ų×ŖĢåµÄĶ£Ö¹Ī»ÖĆ£¬·§ĆŵÄæŖ»ņ¹ŲĪ»ÖĆ”£
””””³ß“ēæŲÖĘ
””””½šŹō°å³å¼ōµÄ³ß“ēæŲÖĘ×°ÖĆ£»×Ō¶ÆŃ”Ōń”¢¼ų±š½šŹō¼ž³¤¶Č£»¼ģ²ā×Ō¶Æ×°Š¶Ź±¶ŃĪļøß¶Č£»¼ģ²āĪļĘ·µÄ³¤”¢æķ”¢øßŗĶĢå»ż”£
””””¼ģ²āĪļĢå“ęŌŚÓŠ·ń ¼ģ²āÉś²ś°ü×°ĻßÉĻÓŠĪŽ²śĘ·°ü×°Ļ䣻¼ģ²āÓŠĪŽ²śĘ·Įć¼ž”£
””””×ŖĖŁÓėĖŁ¶ČæŲÖĘ
””””æŲÖĘ“«ĖĶ“ųµÄĖŁ¶Č£»æŲÖĘŠż×Ŗ»śŠµµÄ×ŖĖŁ£»Óėø÷ÖÖĀö³å·¢ÉśĘ÷Ņ»ĘšæŲÖĘ×ŖĖŁŗĶ×ŖŹż”£
””””¼ĘŹż¼°æŲÖĘ
””””¼ģ²āÉś²śĻßÉĻĮ÷¹żµÄ²śĘ·Źż£»øßĖŁŠż×ŖÖį»ņÅĢµÄ×ŖŹż¼ĘĮ棻Įć²æ¼ž¼ĘŹż”£
””””¼ģ²āŅģ³£
””””¼ģ²āĘæøĒÓŠĪŽ£»²śĘ·ŗĻøńÓė²»ŗĻøńÅŠ¶Ļ£»¼ģ²ā°ü×°ŗŠÄŚµÄ½šŹōÖĘʷȱ·¦Óė·ń£»Ēų·Ö½šŹōÓė·Ē½šŹōĮć¼ž£»²śĘ·ÓŠĪŽ±źÅĘ¼ģ²ā£»ĘšÖŲ»śĪ£ĻÕĒų±Ø¾Æ£»°²Č«·öĢŻ×Ō¶ÆĘōĶ£”£
””””¼ĘĮææŲÖĘ
””””²śĘ·»ņĮć¼žµÄ×Ō¶Æ¼ĘĮ棻¼ģ²ā¼ĘĮæĘ÷”¢ŅĒ±ķµÄÖøÕė·¶Ī§¶ųæŲÖĘŹż»ņĮ÷Į棻¼ģ²āø”±źæŲÖĘ²āĆęøß¶Č£¬Į÷Į棻¼ģ²ā²»ŠāøÖĶ°ÖŠµÄĢśø”±ź£»ŅĒ±ķĮæ³ĢÉĻĻŽ»ņĻĀĻŽµÄæŲÖĘ£»Į÷ĮææŲÖĘ£¬Ė®Ę½ĆęæŲÖĘ”£
””””Ź¶±š¶ŌĻó
””””øł¾ŻŌŲĢåÉĻµÄĀėŹ¶±šŹĒÓė·Ē”£
””””ŠÅĻ¢“«ĖĶ
””””ASI£Ø×ÜĻߣ©Į¬½ÓÉč±øÉĻø÷øöĪ»ÖĆÉĻµÄ“«øŠĘ÷ŌŚÉś²śĻߣØ50-100Ć×£©ÖŠµÄŹż¾ŻĶł·µ“«ĖĶµČ”£
|
½Ó½üæŖ¹Ų“«øŠĘ÷øÅŅŖ
½Ó½üæŖ¹Ų“«øŠĘ÷µÄ¶ØŅå
¢ŁÓÉÓŚÄÜŅŌ·Ē½Ó“„·½Ź½½ųŠŠ¼ģ²ā£¬ĖłŅŌ²»»įÄ„ĖšŗĶĖšÉĖ¼ģ²ā¶ŌĻóĪļ”£ ¢ŚÓÉÓŚ²ÉÓĆĪŽ½ÓµćŹä³ö·½Ź½£¬Ņņ“ĖŹŁĆüŃÓ³¤£Ø“ÅĮ¦Ź½³żĶā£©²ÉÓĆ°ėµ¼ĢåŹä³ö£¬¶Ō½ÓµćµÄŹŁĆüĪŽÓ°Ļģ”£ ¢Ū Óė¹ā¼ģ²ā·½Ź½²»Ķ¬£¬ŹŹŗĻŌŚĖ®ŗĶÓĶµČ»·¾³ĻĀŹ¹ÓĆ¼ģ²āŹ±¼øŗõ²»ŹÜ¼ģ²ā¶ŌĻóµÄĪŪ×ÕŗĶÓĶ”¢Ė®µČµÄÓ°Ļģ”£“ĖĶā£¬»¹°üĄØ·śŹ÷Ö¬ĶāæĒŠĶ¼°ÄĶŅ©Ę·Į¼ŗĆµÄ²śĘ· ¢Ü Óė½Ó“„Ź½æŖ¹ŲĻą±Č£¬æÉŹµĻÖøßĖŁĻģÓ¦ ¢Ż ÄܶŌÓ¦¹ć·ŗµÄĪĀ¶Č·¶Ī§ ¢Ž ²»ŹÜ¼ģ²āĪļĢåŃÕÉ«µÄÓ°Ļģ¶Ō¼ģ²ā¶ŌĻóµÄĪļĄķŠŌÖŹ±ä»Æ½ųŠŠ¼ģ²ā£¬ĖłŅŌ¼øŗõ²»ŹÜ±ķĆęŃÕÉ«µČµÄÓ°Ļģ”£ ¢ßÓė½Ó“„Ź½²»Ķ¬£¬»įŹÜÖÜĪ§ĪĀ¶ČµÄÓ°Ļģ”¢ÖÜĪ§ĪļĢ唢Ķ¬Ąą“«øŠĘ÷µÄÓ°Ļģ°üĄØøŠÓ¦ŠĶ”¢¾²µēČŻĮæŠĶŌŚÄŚ£¬“«øŠĘ÷Ö®¼äĻą»„Ó°Ļģ”£Ņņ“Ė£¬¶ŌÓŚ“«øŠĘ÷µÄÉčÖĆ£¬ŠčŅŖæ¼ĀĒĻą»„øÉČţؔśµŚ1339Ņ³£©”£“ĖĶā£¬ŌŚøŠÓ¦ŠĶÖŠ£¬ŠčŅŖæ¼ĀĒÖÜĪ§½šŹōµÄÓ°Ļģ£¬¶ųŌŚ¾²µēČŻĮæŠĶÖŠŌņŠčæ¼ĀĒÖÜĪ§ĪļĢåµÄÓ°Ļģ”£
½Ó½ü“«øŠĘ÷ŌĄķ
øŠÓ¦ŠĶ½Ó½ü“«øŠĘ÷µÄ¼ģ²āŌĄķ ĶعżĶā²æ“ų”Ó°Ļģ£¬¼ģ²āŌŚµ¼Ģå±ķĆę²śÉśµÄĪŠµēĮ÷ŅżĘšµÄ“ÅŠŌĖšŗÄ”£ŌŚ¼ģ²āĻßȦČŹ¹Ęä²śÉś½»Į÷“ų”£¬²¢¼ģ²āĢåµÄ½šŹōĢå²śÉśµÄĪŠµēĮ÷ŅżĘšµÄ×čæ¹±ä»Æ½ųŠŠ¼ģ²āµÄ·½Ź½”£ °ć¼ģ²ā½šŹōµČµ¼Ģ唣 “ĖĶā£¬×÷ĪŖĮķĶāŅ»ÖÖ·½Ź½£¬»¹°üĄØ¼ģ²āʵĀŹĻąĪ»³É·ÖµÄĀĮ¼ģ²ā“«øŠĘ÷£¬ŗĶĶعż¹¤×÷ĻßȦ½ö¼ģ²ā×čæ¹±ä»Æ³É·ÖµÄČ«½šŹō“«øŠĘ÷”£ £¼¶ØŠŌµÄĖµĆ÷£¾ ŌŚ¼ģ²āĢåŅ»²ąŗĶ“«øŠĘ÷Ņ»²ąµÄ±ķĆęÉĻ£¬·¢Éś±äŃ¹Ę÷µÄדĢ¬”£
×č湵ıä»Æ£¬æÉŅŌŹÓ×÷“®ĮŖ²åČė¼ģ²āĢåŅ»²ąµÄµē×čÖµµÄ±ä»Æ”££ØÓėŹµ¼Ź×“Ģ¬ÓŠĖł²īŅģ£¬µ«Ņ×ÓŚ¶ØŠŌ·Ö½ā£©
¾²µēČŻĮæŠĶ½Ó½ü“«øŠĘ÷µÄ¶Æ×÷ŌĄķ
¶Ō¼ģ²āĢåÓė“«øŠĘ÷¼ä²śÉśµÄ¾²µēČŻĮæ±ä»Æ½ųŠŠ¼ģ²ā”£ČŻĮæ“óŠ”øł¾Ż¼ģ²āĢåµÄ“óŠ”ŗĶ¾ąĄė¶ų±ä»Æ”£Ņ»°ćµÄ¾²µēČŻĮæŠĶ½Ó½ü“«øŠĘ÷£¬¶ŌĻńµēČŻĘ÷Ņ»ŃłĘ½ŠŠÅäÖƵÄ2æéĘ½ŠŠ°åµÄČŻĮæ½ųŠŠ¼ģ²āµÄĶ¼Ļń“«øŠĘ÷”£Ę½ŠŠ°åµ„²ą·Ö±š×÷ĪŖ±»²ā¶ØĪļ£Ø“¦ÓŚĻėĻń½ÓµŲדĢ¬£©£¬¶ųĮķŅ»²ą×÷ĪŖ“«øŠĘ÷¼ģ²āĆę”£¶ŌÕā2¼«¼äŠĪ³ÉµÄ¾²µēČŻĮæ±ä»Æ½ųŠŠ¼ģ²ā”£æɼģ²āĪļĢåøł¾Ż¼ģ²ā¶ŌĻóµÄøŠÓ¦ĀŹ²»Ķ¬¶ųÓŠĖł±ä»Æ£¬²»½ö½šŹō£¬Ņ²ÄܶŌŹ÷Ö¬”¢Ė®µČ½ųŠŠ¼ģ²ā”£
“ÅĮ¦Ź½½Ó½ü“«øŠĘ÷µÄ¶Æ×÷ŌĄķ
ÓĆ“ÅŹÆŹ¹æŖ¹ŲµÄµ¼Ę¬¶Æ×÷”£Ķعż½«Ņżµ¼æŖ¹ŲÖĆÓŚON£¬Ź¹æŖ¹Ų“ņæŖ”£
½Ó½ü“«øŠĘ÷·ÖĄą
°“¼ģ²ā·½Ź½Ń”ŌńµÄÖŲµć |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
½Ó½ü“«øŠĘ÷ŹõÓļ½āĖµ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
±ź×¼¼ģ²āĪļĢå |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
×÷ĪŖ²ā¶Ø»ł±¾ŠŌÄܵļģ²āĪļĢ壬Ęä²ÄĮĻ”¢ŠĪד”¢³ß“ēµČ¶¼ÓŠ¹ę¶Ø”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¼ģ²ā¾ąĄė |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ÓĆÖø¶ØµÄ·½·ØŅĘ¶Æ±ź×¼¼ģ²āĪļĢ壬ÓÉ»ł×¼Ī»ÖĆ£Ø»ł×¼Ćę£©²ā³öµÄÖĮ¶Æ×÷£Øø“Ī»£©ĪŖÖ¹µÄ¾ąĄė”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Éč¶Ø¾ąĄė |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
°üĄØĪĀ¶Č”¢µēŃ¹µÄÓ°ĻģŌŚÄŚ£¬æÉĪČ¶ØŹ¹ÓĆµÄ¼ģ²āĆęÓė£Ø±ź×¼£©¼ģ²āĪļĢåĶعżĪ»ÖĆ¼äĪŖÖ¹µÄ¼äøō”£Ķس£ŹĒ£Ø¶ī¶Ø£©¼ģ²ā¾ąĄėµÄŌ¼70”«80£„”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
²ī¶Æ£Ø²ī¶ÆµÄ¾ąĄė£© |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
±ź×¼¼ģ²āĪļĢåÓė“«øŠĘ÷µÄ¾ąĄėÖŠ£¬“«øŠĘ÷”ø¶Æ×÷”¹Ź±Óė”øø“Ī»”¹Ź±Ö®¼äµÄ¾ąĄė²ī”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ĻģÓ¦Ź±¼ä |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
t1:±ź×¼¼ģ²āĪļĢå½ųČė“«øŠĘ÷µÄ¶Æ×÷ĒųÓņ£¬“«øŠĘ÷“Ó“¦ÓŚ”ø¶Æ×÷”¹×“Ģ¬µ½Źä³öĪŖONµÄŹ±¼ä”£ t2:±ź×¼¼ģ²āĪļĢåĄėæŖ“«øŠĘ÷µÄ¶Æ×÷ĒųÓņ£¬“«øŠĘ÷µÄŹä³öÖĮOFFµÄŹ±¼ä”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ĻģӦʵĀŹ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
·“ø“½Ó½ü±ź×¼¼ģ²āĪļĢåŹ±£¬ĆæĆėÖÓ¼ģ²āĖęÖ®²śÉśµÄŹä³öµÄ“ĪŹż”£ ²ā¶Ø·½·ØĒė²Ī¼ūø½Ķ¼”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ĘĮ±Ī |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
øĆŠĶŗÅ“ÅĶؼÆÖŠŌŚ“«øŠĘ÷µÄĒ°²æ£¬¼ģ²āĻßȦµÄ²ąĆęÓĆ½šŹōø²øĒ”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
·ĒĘĮ±Ī |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
øĆŠĶŗÅ“ÅĶعć·ŗ·¢ÉśŌŚ“«øŠĘ÷µÄĒ°²æ£¬¼ģ²āĻßȦµÄ²ąĆęĪ“±»½šŹōø²øĒ”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ĢŲŠŌŹż¾ŻµÄ¶Į·Ø |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¹²ĶØ×¢ŅāŹĀĻī ”ļø÷ÉĢĘ·µÄ×¢ŅāŹĀĻī£¬Ēė²Ī¼ūø÷ÉĢĘ·µÄ”ø ĒėÕżČ·Ź¹ÓĆ ”¹”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
²»ÄÜ×÷ĪŖ³åŃ¹µÄ°²Č«×°ÖĆ»ņĘäĖūČĖĢå±£»¤ÓĆ°²Č«×°ÖĆŹ¹ÓĆ |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
±¾²śĘ·Óė°²Č«ŠŌĪŽ¹Ų£¬Ö÷ŅŖÓĆÓŚ¹¤¼žŗĶ×÷ŅµÕߵļģ²āÓĆĶ¾”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
°²Č«ŅŖµć |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ĪŖĮĖČ·±£°²Č«£¬ĒėĪń±Ų×ńŹŲŅŌĻĀø÷ĻīÄæµÄÄŚČŻ”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
”ń²¼Ļߏ± |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
”ńŹ¹ÓĆ»·¾³ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ĒėĪšŌŚÓŠŅ×Č¼Ņ×±¬ĘųĢåµÄ»·¾³ĻĀŹ¹ÓĆ”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
mT£ØĪ¢ĢŲĖ¹Ą£©£ŗ“ÅĶØĆܶȓóµÄµ„Ī»”£1ĢŲĖ¹ĄĻąµ±ÓŚ10,000øßĖ¹”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
”ńÉč¼ĘŹ± |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¼ģ²āĪļĢåµÄ²ÄĮĻ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
øł¾Ż¼ģ²āĪļĢåµÄ²ÄĮĻ²»Ķ¬£¬Ęä¼ģ²ā¾ąĄėÓŠ×ÅĻŌÖųµÄ²ī±š£¬Ēė²Ī¼ū”ø¼ģ²āĪļĢåµÄ²ÄĮĻŗĶ“󊔵ÄÓ°Ļģ”¹µÄĢŲŠŌŹż¾Ż£¬øųÓč³äŌ£µÄÉč¶Ø¾ąĄė”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ņ»°ć¼ģ²āĪļĢåĪŖ·Ē“ÅŠŌ½šŹō£ØĄżČēĀĮµČ£©£¬ÄĒĆ“¼ģ²ā¾ąĄė»į±äŠ””£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¼ģ²āĪļĢåµÄ“óŠ” |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ņ»°ćĄ“Ėµ£¬µ±¼ģ²āĪļĢåµÄ“󊔊”ÓŚ±ź×¼¼ģ²āĪļĢåŹ±£¬¼ģ²ā¾ąĄė»į±äŠ””£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ēė°“”ø¼ģ²āĪļĢåµÄ“óŠ”Óė¼ģ²ā¾ąĄė”¹Ķ¼±ķ£¬½ųŠŠ“óÓŚ±ź×¼¼ģ²āĪļĢåµÄÉč¼Ę”£ Š”ÓŚ±ź×¼¼ģ²āĪļĢåŹ±£¬ĒėŌŚÉč¶Ø¾ąĄėÉĻĮōÓŠ³ä·ÖµÄÓą¶Č”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¼ģ²āĪļĢåµÄŗń¶Č |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
“ÅŠŌ½šŹō£ØĢś”¢ÄųµČ£©µÄŗń¶ČĒė“óÓŚ1mm”£ ŗń¶ČŠ”ÓŚ0.01mmµÄ²£¬æÉŅŌµĆµ½Óė“ÅŠŌĢåĶ¬µČµÄ¼ģ²ā¾ąĄė”£ “ĖĶā£¬¶ŌÕōĤµČ¼«±”²ÄĮĻ¼°ĪŽµ¼µēŠŌĪļĢåŅ²ĪŽ·Ø¼ģ²ā”£ µē¶ĘµÄÓ°Ļģ””µ±¼ģ²āĪļĢåµē¶Ęŗ󣬼ģ²ā¾ąĄė»į·¢Éś±ä»Æ”££Ø²Ī¼ūĻĀ±ķ£© |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
µē¶ĘµÄÓ°Ļģ£Ø²Īæ¼Ąż£© |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
²Īæ¼Öµ£ŗĻą¶ŌÓŚĪŽµē¶ĘµÄ¼ģ²ā¾ąĄėµÄ%£© |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¹ŲÓŚĻą»„øÉČÅ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ļą»„øÉČÅÖøŹÜĻąĮŚ“«øŠĘ÷“ÅŠŌ£Ø»ņ¾²µēČŻĮ棩µÄÓ°Ļģ£¬Źä³ö“¦ÓŚ²»ĪČ¶ØµÄדĢ¬”£ ææ½ü½Ó½ü“«øŠĘ÷°²×°Ź±£¬ÓŠ½»ĢęÅäÖĆ²»Ķ¬ĘµĀŹŠĶµÄ·½·Ø”£ŌŚø÷ÖÖŠĶŗŵÄÖÖĄą±ķÖŠ¶Ō²»Ķ¬ĘµĀŹµÄÓŠĪŽ¶¼ÓŠ¼ĒŌŲ£¬ĒėÓčŅŌ²Ī¼ū”£ ææ½üĻąĶ¬ĘµĀŹµÄ½Ó½ü“«øŠĘ÷£¬½ųŠŠ²¢ĮŠ”¢Ļą¶Ō°²×°Ź±£¬ŌŚ¼äøō·½ĆęÓŠĻŽÖĘ£¬ĻźĻøÄŚČŻĒė²Ī¼ūø÷»śŠĶÄ©Ī²µÄ”ø ĒėÕżČ·Ź¹ÓĆ ”¹ÖŠµÄ”ø Ļą»„øÉČÅ ”¹µÄĻī”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¹ŲÓŚµēŌ“ø“Ī»Ź±¼ä |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
“«øŠĘ÷ŌŚµēŌ“½ÓĶØŗó100msŅŌÄŚ¼““¦ÓŚæɼģ²āדĢ¬”£½«øŗŌŲÓė“«øŠĘ÷Į¬½ÓŌŚ²»Ķ¬µēŌ“Ź±£¬ĒėĪń±ŲĻČ½ÓĶØ“«øŠĘ÷µēŌ“”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¹ŲÓŚµēŌ“OFF |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ŅņĪŖµēŌ“OFFŹ±»į·¢ÉśŹä³öĀö³å£¬ŠčÉč¼Ę³ÉČĆøŗŌŲ»ņøŗŌŲĻßĀ·µÄµēŌ“ĻČŠŠOFF”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ÖÜĪ§½šŹōµÄÓ°Ļģ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ŌŚ½Ó½üæŖ¹ŲµÄ¼ģ²āĆęø½½ü“ęŌŚ¼ģ²āĪļĢåŅŌĶāµÄ½šŹōĪļĢåŹ±£¬»įÓ°Ļģ¼ģ²āŠŌÄÜ£¬³öĻÖ±ķĆęµÄ¶Æ×÷¾ąĄė±ä“ó£¬ĪĀ¶ČĢŲŠŌ±ä²ī£¬ø“Ī»²»Į¼µČĻÖĻó”£ĻźĻøÄŚČŻĒė²Ī¼ūø÷»śŠĶµÄ”ø ĒėÕżČ·Ź¹ÓĆ ”¹ÖŠµÄÖÜĪ§½šŹōµÄÓ°Ļģ±ķ”£Ķ¬Ź±£¬±ķÖŠĖłĮŠø÷ÖµĻµŹ¹ÓĆø½ÓŚø÷»śŠĶµÄĀŻÄøŹ±µÄŹżÖµ£¬µ±ĀŻÄøµÄ²ÄĮĻ·¢Éś±ä»ÆŹ±£¬ÖÜĪ§½šŹōµÄÓ°ĻģŅ²»į·¢Éś±ä»Æ”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¹ŲÓŚµēŌ“±äŃ¹Ę÷ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ĒėĪń±ŲŌŚÖ±Į÷µēŌ“ÖŠŹ¹ÓĆ¾ųŌµ±äŃ¹Ę÷£¬ĒėĪšŹ¹ÓĆ×Ō¶Æ±äŃ¹Ę÷£Øµ„¾ķ±äŃ¹Ę÷£©”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ź¹ÓĆ½»Į÷2Ļߏ½/Ö±Į÷2Ļߏ½Ź±Ēėæ¼ĀĒŅŌĻĀø÷ĻīÄæ: |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ĄĖÓæ±£»¤ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ź¹ÓĆ½Ó½ü“«øŠĘ÷ø½½ü»į²śÉś“óĄĖÓæµÄ×°ÖĆ£Øµē»ś”¢µēŗø»śµČ£©Ź±£¬ĖäČ»½Ó½ü“«øŠĘ÷ÖŠÄŚÖĆĮĖĄĖÓæĪüŹÕĘ÷£¬µ«ČŌĒė½«ĄĖÓæĪüŹÕĘ÷²åČė·¢ÉśŌ“ÄŚ”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ĻūŗÄ£ØĀ©µē£©µēĮ÷µÄÓ°Ļģ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¼“Ź¹½Ó½ü“«øŠĘ÷OFFŹ±£¬Ņ²»įŅņµēĀ·µÄŌĖŠŠ¶ųÓŠÉŁĮæµÄµēĮ÷Š¹Ā©,Ņņ“Ė£¬»į·¢ÉśøŗŌŲÄŚ²ŠĮōÉŁĮæµēĮ÷£ØøŗŌŲ²ŠĮōµēŃ¹£©£¬øŗŌŲµÄø“Ī»²»Į¼ĻÖĻó”£Ź¹ÓĆĒ°£¬ĒėČ·ČĻøƵēŃ¹Š”ÓŚøŗŌŲµÄø“Ī»µēŃ¹£ØĀ©µēĮ÷Š”ÓŚøŗŌŲµÄø“Ī»µēĮ÷£©”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ĻūŗÄ£ØĀ©µē£©µēĮ÷Ó°ĻģµÄ¶Ō²ß·½·Ø£ØĄż£© |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
½»Į÷2Ļߏ½ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Į¬½Ó·ÖŠ¹µē×č£¬½«øŗŌŲÖŠĮ÷¶ÆµÄĀ©µēÅŌĀ··ÖĮ÷£¬Ź¹øŗŌŲÖŠĮ÷¶ÆµÄµēĮ÷½µÖĮø“Ī»µēĮ÷ŅŌĻĀ”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ēėøł¾ŻŅŌĻĀ¹«Ź½¼ĘĖć·ÖŠ¹µē×čÖµ¼°ČŻŠķµēĮ¦”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
P£ŗ·ÖŠ¹µē×čµÄWŹż£ØŹµ¼ŹŹ¹ÓĆŹ±ĒėŹ¹ÓĆŹż±¶ŅŌÉĻµÄWŹż£©”£II£ŗøŗŌŲµēĮ÷£ØmA£©²¢ĒŅ£¬½ØŅéøł¾ŻÓą¶Č£¬AC100VŹ±ĒėŹ¹ÓĆ10k¦øŅŌĻĀ3W£Ø5W£©ŅŌÉĻ£¬ AC200VŹ±ĒėŹ¹ÓĆ20k¦øŅŌĻĀ10W£Ø20W£©ŅŌÉĻ”£µ±·¢ČČÓ°ĻģÓŠĪŹĢāŹ±£¬ĒėŹ¹ÓĆ“óÓŚ£Ø £©ÄŚµÄWŹż”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ö±Į÷2Ļߏ½ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Į¬½Ó·ÖŠ¹µē×菱£¬½«øŗŌŲÖŠĮ÷¶ÆµÄĀ©µēĮ÷ÅŌĀ··ÖĮ÷£¬Ź¹øŗŌŲÖŠĮ÷¶ÆµÄµēĮ÷ĪŖĀ©µēĮ÷”ĮøŗŌŲµÄŹäČė×čæ¹£¼ø“Ī»µēŃ¹”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ēėøł¾ŻĻĀĮŠ¹«Ź½¼ĘĖć·ÖŠ¹µē×čÖµ¼°ČŻŠķµēĮ¦”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
P£ŗ·ÖŠ¹µē×čµÄWŹż£ØŹµ¼ŹŹ¹ÓĆŹ±ĒėŹ¹ÓĆŹż±¶ŅŌÉĻµÄWŹż£©”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
iR£ŗ½Ó½üæŖ¹ŲµÄĀ©µēĮ÷£ØmA£© |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
iOFF£ŗøŗŌŲµÄø“Ī»µēĮ÷£ØmA£© |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
µ«ŹĒ£¬½ØŅéøł¾ŻÓą¶Č£¬DC12VŹ±ĒėŹ¹ÓĆ15k ¦ø ŅŌĻĀ450mWŅŌÉĻ£¬DC24VŹ±ĒėŹ¹ÓĆ30k ¦ø ŅŌĻĀ0.1WŅŌÉĻ”£
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ÓæČėµēĮ÷µÄ“óøŗŌŲ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
µĘŗĶµē»śµČÓæČėµēĮ÷µÄ“óøŗŌŲ£Ŗ»įŌģ³ÉæŖ¹ŲŌŖ¼žµÄĮÓ»ÆŗĶĘĘĖš |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
“ĖŹ±ĒėŹ¹ÓĆ¼ĢµēĘ÷E2K/TL-N”õY£ŗ1AŅŌÉĻ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
”ń°²×°Ź± |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¹ŲÓŚ°²×° |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
°²×°“«øŠĘ÷Ź±£¬Ēė±ÜĆāÓĆ“ø×ӵȏ©¼Ó¹ż“óµÄ³å»÷Į¦£¬ŅŌĆāÄĶĖ®¹¦ÄÜ·¢ÉśĮӻƔ¢Ėš»µ”£“ĖĶā£¬ÓĆĀŻĖؽō¹ĢŹ±£¬ĀŻÄøµÄ½ō¹ĢĒæ¶ČÓŠČŻŠķ·¶Ī§£¬Ņ²ÓŠ±ŲŠėŹ¹ÓĆ³ŻŠĪµęȦµÄ»śŠĶ”£ĻźĻøÄŚČŻĒė²Ī¼ūøĆŠĶŗÅÄ©Ī²µÄ”ø Ź¹ÓĆ×¢ŅāŹĀĻī ”¹ÖŠ°²×°Ź±µÄ×¢ŅāŹĀĻī”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¹ŲÓŚDINµ¼¹ģ°²×°/²šŠ¶ £ØŅŌE2CYĪŖŹ¾Ąż£©”“°²×°”µ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¢Ł½«Ē°²æ·ÅČė×ØÓĆ°²×°¹Ģ¶ØÅ伞£Øø½Źō£©»ņDINµ¼¹ģÖŠ”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¢Ś½«ŗó²æĶĘŃ¹½ų×ØÓĆ°²×°Å伞»ņDINµ¼¹ģÖŠ”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ź¹ÓĆ×ØÓĆ°²×°Å伞½ųŠŠ²ąĆę°²×°Ź±£¬ĻČ½«×ØÓĆ°²×°¹Ģ¶ØÅ伞¹Ģ¶ØŌŚ·Å“óĘ÷µ„ŌŖÉĻ£¬ŌŁÓĆM3ĀŻ¶¤½ųŠŠ°²×°”£ “ĖŹ±æÉŹ¹ÓƦÕ6ŅŌĻĀµÄĘ½µęȦ”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
”“²šŠ¶”µ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
½«·Å“óĘ÷µ„ŌŖ°“¢Ū·½ĻņĶĘŃ¹µÄĶ¬Ź±£¬½«“«øŠĘ÷µ¼Ļß²åČė²æĻņ¢Ü·½ĻņĢ§Ęš£¬ĪŽŠčĀŻĖ浶¾Ķæɼņµ„µŲ½ųŠŠ²šŠ¶”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¹ŲÓŚÉč¶Ø¾ąĄė |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ĪĀ¶Č”¢µēŃ¹µÄ±ä¶Æ»įŅżĘš¼ģ²ā¾ąĄėµÄ±ä»Æ”£½ØŅé“«øŠĘ÷°²×°Ź±£¬øł¾Ż”øÉč¶Ø¾ąĄė”¹½ųŠŠÉčÖĆ”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
”ńÅäĻߏ± |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
½Ó½üæŖ¹ŲµÄAND&OR²¼Ļß |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
AND.ORĮ¬½ÓŹ¹ÓĆŹ±£¬ÓŠŹ±»įŅņ“ķĪóĀö³å¼°Ā©µēµČÓ°Ļģµ¼ÖĀĪŽ·ØŹ¹ÓĆ£¬ĒėŌŚŹ¹ÓĆĒ°Č·ČĻƻӊĪŹĢāŗóŌŁŹ¹ÓĆ”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¹ŲÓŚµ¼ĻßµÄŃÓ³¤ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
·Å“óĘ÷ÄŚÖĆŠĶµÄø÷ÖÖ±ź×¼µ¼Ļߵij¤¶ČŌŚ200mŅŌÄŚ£ØŅ»²æ·Ö»śŠĶ³żĶā£©”£Ķ¬Ź±£¬·Å“óĘ÷·ÖĄėŠĶ£ØE2C-EDA”¢E2C”¢ E2J”¢E2CY£©Ēė²Ī¼ūø÷×ŌµÄ×¢ŅāŹĀĻī”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¹ŲÓŚµ¼ĻßµÄĶäĒś²¼Ļß |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
½«µ¼ĻßĶäĒś²¼Ļߏ±£¬½ØŅé²ÉÓƵ¼Ķā¾¶3±¶ŅŌÉĻµÄĶäĒś°ė¾¶”££ØĶ¬ÖįĻßĘĮ±ĪĻß³żĶā£© |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¹ŲÓŚµ¼ĻߵĥÉģĒæ¶Č |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ķس££¬Ź©¼ÓĮ¦ĒėĪš³¬¹żĻĀ±ķĖłŹ¾Öµ”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ķ¬Ź±£¬ĒėĪšŌŚĘĮ±ĪĻß”¢Ķ¬ÖįĻßÉĻŹ©¼ÓĄÉģĮ¦”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¹ŲÓŚŗĶøßŃ¹ĻßµÄĒų±š |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
½šŹōÅä¹ÜµÄŹµŹ© |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ĪŖĮĖ·ĄÖ¹µēĮ¦Ļß”¢¶ÆĮ¦ĻßŌŚĶعż½Ó½ü“«øŠĘ÷µ¼Ļßø½½üŹ±ŅżĘšµÄĪó¶Æ×÷ŗĶĘĘĖš£¬Ēė½ųŠŠµ„¶ĄµÄ½šŹōÅä¹Ü”££ØÖ±Į÷ŠĶŅ²ĻąĶ¬£©”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Óė“«øŠĘ÷æŲÖĘĘ÷S3D2µÄĮ¬½ÓŹ¾Ąż |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ö±Į÷2ĻߊĶ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ź¹ÓĆS3D2Ź± |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Óė¼ĢµēĘ÷øŗŌŲµÄĮ¬½Ó |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ö±Į÷2Ļߏ½ÖŠÓŠ3V²ŠĮōµēŃ¹£¬ĒėČ·ČĻ¼ĢµēĘ÷µÄ¶Æ×÷µēŃ¹ŗóŌŁŹ¹ÓĆ”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
µ«ŹĒE2E-XD-M1J-TµÄ²ŠĮōµēŃ¹ĪŖ5V |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ö±Į÷3ĻߊĶ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
”ńŹ¹ÓĆ»·¾³ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¹ŲÓŚÄĶĖ®ŠŌ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
±ÜĆāŌŚĖ®ÖŠ”¢½µÓźÖŠ¼°ŹŅĶāŹ¹ÓĆ”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
”ń¹ŲÓŚ»·¾³ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
°²×°ŌŚŅŌĻĀ³”ĖłŹ±£¬æɵ¼ÖĀĪó¶Æ×÷ŗĶ¹ŹÕĻ£¬ĖłŅŌĒė±ÜĆāŹ¹ÓĆ”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1. ĪŖĮĖĪ¬³Ö¶Æ×÷µÄæÉææŠŌŗĶ³¤ŹŁĆü£¬Ēė±ÜĆāŌŚ¹ę¶ØĶāµÄĪĀ¶ČŗĶŹŅĶāĢõ¼žĻĀŹ¹ÓĆ”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2. ½Ó½ü“«øŠĘ÷²ÉÓĆÄĶĖ®¹¹Ōģ£¬µ«ĪŖĮĖ±ÜĆāĖ®µČÖ±½Ó½Ó“„£¬ČŌŠč°²×°·ĄĖ®øĒ×Ó£¬ÕāŃłæɽųŅ»²½ĢįøßæÉææŠŌŗĶŹŁĆü”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3. Ēė±ÜĆāŌŚÓŠ»ÆѧŅ©Ę·£¬ĢŲ±šŹĒĒæ¼ī”¢Ėį£ØĻõĖį”¢øõĖį”¢ČČÅØĮņĖįµČ£©µÄ»·¾³ÖŠŹ¹ÓĆ”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
”ń±£Ńų¼ģ²é |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¶ØĘŚ¼ģ²é |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ĪŖŹ¹½Ó½ü“«øŠĘ÷Äܳ¤ĘŚĪČ¶ØµŲ¶Æ×÷£¬Ó¦¶ØĘŚ½ųŠŠÓėŅ»°ćµÄæŲÖĘ»śĘ÷ĻąĶ¬ÄŚČŻµÄ¼ģ²é”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1. ¼ģ²āĪļĢå¼°½Ó½ü“«øŠĘ÷µÄ°²×°Ī»ÖĆÓŠĪŽĘ«Ąė”¢ĖɳŚ”¢ĶįŠ±”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2. ²¼Ļß”¢Į¬Ļß²æÓŠĪŽĖɳŚ”¢½Ó“„²»Į¼”¢¶ĻĻß”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3. ŹĒ·ńÓŠ½šŹō·Ū³¾µČµÄÕ³ø½”¢¶Ń»ż”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
4. Ź¹ÓĆĪĀ¶ČĢõ¼ž”¢»·¾³Ģõ¼žŹĒ·ńÓŠŅģ³£”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5. Éč¶ØĻŌŹ¾µĘŠĶµÄÉĮĖøŹĒ·ńÓŠŅģ³£”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
·Ö½āÓėŠŽĄķ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
**²»ÄÜ×ŌŠŠ½ųŠŠ·Ö½āŗĶŠŽĄķ”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
¹ŹÕĻµÄ¼ņŅ×¼ģ²é |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ĪŖÄܼņŅ×µŲ²é³ö¹ŹÕĻ£¬æÉĶعżÓėE39-VAŹÖĢįŹ½¼ģ²āĘ÷µÄĮ¬½Ó½ųŠŠ“«øŠĘ÷¶Æ×÷דĢ¬µÄµ÷²é”£ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||




»śŠµÄܹ»Ąķ½āČĖµÄÓļŃŌ”¢ŠŠ¶ÆŗĶÉķĢåדæö£¬²¢ĒŅÄܹ»ÅäŗĻČĖĄą½ųŠŠ¶Æ×÷”¢ŌŚÖĘŌģĻÖ³”ĪŖČĖĄąĢį¹©Ö§³Ö”Ŗ”ŖÕāŹĒÅ·Ä·Įś¶ŌÓŚÖĘŌģŅµĪ“Ą“µÄŌø¾°”£Ī“Ą“£¬ČĖĆĒ½«°Ń»śŠµÄÜ×öµÄŹĀĒé½»øų»śŠµČ„×ö£¬“ÓĖöĖéµÄ¹¤×÷ÖŠ½ā·Å³öĄ“”£ČĖĆĒæÉŅŌ°Ń¾«Į¦¼ÆÖŠÓŚøüø»““ŌģŠŌµÄ¹¤×÷£¬ŃŠ¾æŠĀµÄ²śĘ·ÖĘŌģ£¬“Ó¶ųŹ¹ÖĘŌģŅµ±äµĆøü¼Óø»ÓŠĄÖȤ”£¶ųÖĘŌģŅµ±äµĆ¼ņµ„Ö®ŗó£¬ŌŚ**ČĪŗĪŅ»øöµŲ·½¶¼ÄÜ**Éś²ś³ö·ūŗĻĻū·ŃÕߊčĒóµÄ²śĘ·£¬ĪŅĆĒ½«ÓµÓŠŅ»øö×æÓŠ³ÉŠ§µÄĪ“Ą“£¬ĆæøöČĖ¶¼æÉŅŌĖꏱ»ńµĆ·ūŗĻøöČĖŠčĒ󔢾ßÓŠ×ŌÉķ¶ĄĢŲ·ēøńµÄĪļĘ·”£Å·Ä·ĮśÕżŌŚæŖ·¢µÄ¼¼Źõ½«Ņż·¢**ÖĘŌģŅµĻÖ³”µÄ¾Ž±ä”£
ŌŚÖĘŌģĻÖ³”æŖÕ¹”°³¬¼¶Éś²śĮ¦”±ŗĶ”°³¬¼¶Įé»īŠŌ”±µÄĢōÕ½
ĄĻĮä»Æµ¼ÖĀĄĶ¶ÆČĖæŚµÄ¼õÉŁŅŌ¼°²śĘ·ÖĘŌģĖłŠčŅŖµÄøß¼¼ÄÜ”¢ÖŖŹ¶ŠĶČĖ²Å²»×ćµČĪŹĢāÕżĄ§ČÅ×ÅÖĘŌģŅµĻÖ³””£ĮķŅ»·½Ćę£¬Ļū·ŃÕߵĊčĒóŃøĖŁ±ä»Æ£¬øüĒ÷ÓŚ¶ąŃł»Æ”£ĪŖĮĖÓ¦¶ŌÕāŠ©ŠčĒ󣬹¤³§ŠčŅŖ**ĒŠ»»Éś²śĘ·ÖÖŗĶŹżĮ棬²¢×öµ½ŌŚ**ČĪŅ»µŲµć¶¼Äܹ»**Ęō¶ÆÉś²ś”£ÖĘŌģŅµĖłĆęĮŁµÄ»·¾³ČÕĒ÷ø“ŌÓ£¬²śĘ·ÖĘŌģĘóŅµÕżŌŚ½ųŠŠŅ»³”Ē°ĖłĪ“ÓŠµÄ”¢Õė¶Ō”°³¬¼¶Éś²śĮ¦”±”¢”°³¬¼¶Įé»īŠŌ”±µČøßÄѶČæĪĢāµÄĢōÕ½”£ŌŚÖĘŌģŅµĮģÓņ£¬Ō½Ą“Ō½¶ąµÄ¹¤³§Ź¹ÓĆ»śĘ÷ČĖĄ“Ķź³É²śĘ·°įŌĖŗĶŹ°Č”×÷Ņµ”£ĮķĶā£¬Ķعż¶ŌĪĀ¶Č”¢ĖŁ¶ČµČÓėÉś²śÉč±øÓŠ¹ŲµÄĖłÓŠŹż¾Ż½ųŠŠ“«øŠ£¬IoTŅ²Ō½Ą“Ō½¹ć·ŗµŲ±»ŅżČėÖĘŌģŅµµÄĻÖ³”£¬“Ó¶ųŹ¹ÄĒŠ©Ī“¾³¤ĘŚŃµĮ·µÄŌ±¹¤Ņ²Äܹ»ŗÜŗƵŲĶź³ÉŌ±¾Ö»ÄÜÓɾŃé·įø»µÄŌ±¹¤Č„Ķź³ÉµÄ»śŠµĪ¬»¤×÷Ņµ”£¶ųAI¼¼ŹõµÄ·¢Õ¹Ņ²¹¹½ØÄܹ»ŌŚ±ŲŅŖŹ±ŃøĖŁĘō¶ÆÉś²śµÄ”°Įé»īŠŌÉś²śĻß”±
¹¹½ØÄܹ»ŌŚ±ŲŅŖŹ±ŃøĖŁĘō¶ÆÉś²śµÄ”°Įé»īŠŌÉś²śĻß”±
½«×Ō¶Æ°įŌĖ»śĘ÷ČĖÓ¦ÓƵ½Éś²śĻßÉĻ£¬æÉŅŌ**”¢Įé»īµŲ±äøüÉś²śµÄĘ·ÖÖŗĶŹżĮ攣µ«ĮķŅ»·½Ćę£¬»śĘ÷ČĖµÄŅżČė»įŹ¹Éś²śĘō¶ÆĒ°µÄÉč±ø×¼±øŹ±¼ä“ó“óŃÓ³¤”£Å·Ä·ĮśÕżÖĀĮ¦ÓŚ½ØÉč”°Įé»īŠŌÉś²śĻß”±£¬Å¬Į¦°ŃÕāŅ»°²×°µ÷ŹŌŹ±¼äŃ¹Ėõµ½**¶Ģ”£
ŅŖČĆ»śĘ÷ČĖÓėĘäĖū×Ō¶ÆÉč±øŗĻ×÷£¬ŠčŅŖ²»¶ĻµŲ½ųŠŠµ÷Õū×÷Ņµ£¬»¹ŠčŅŖĪŖ»śĘ÷ČĖ°“ÕÕĢŲ¶ØĪ»ÖƶØÖĘ¹¤¾ß”£¾ĶÄæĒ°¶ųŃŌ£¬ŅŖĻėČĆ»śĘ÷ČĖÓµÓŠŗĶČĖĄąŅ»ŃłµÄĮé»īŠŌ£¬»¹Ąė²»æŖ×ØÓĆµÄ¹¤¾ß”£
Å·Ä·ĮśČĆÉś²śĻßÉĻµÄ×Ō¶ÆÉč±ø”¢»śĘ÷ČĖŅŌ¼°°²Č«“«øŠĘ÷ŹµĻÖ×ŌÖ÷Š×÷£¬“Ó¶ųĻŌÖų¼õÉŁ°²×°µ÷ŹŌŗĶ²śĘ·ĒŠ»»ĖłŠčŅŖµÄµ÷Õū×÷Ņµ”£
ĮķĶā£¬Å·Ä·Įś»¹½«ŹµĻÖ»śĘ÷ČĖ±¾ÉķµÄøßĖŁ»Æ£¬ČĆŅ»ĢØ»śĘ÷ČĖÄܹ»“ÓŹĀ¶ąÖÖ¹¤×÷£¬¾ß±øÓėČĖĄąŅ»ŃłµÄĮé»īŠŌ£¬ŅŌ±ćׄȔ”¢×é×°²śĘ·”£ÕāŃł£¬Ņ»ĢØ»śĘ÷ČĖæÉŅŌø²øĒµÄ×÷Ņµ·¶Ī§Ą©“óĮĖ£¬ŌŚÉś²śŹ±£¬¾ĶĪŽŠėĻńŅŌĒ°Ņ»Ńłøł¾ŻÉś²śĘ·ÖÖ×¼±øĻąÓ¦ÖÖĄąµÄ×ØÓĆ¹¤¾ß”£
¶ųŅŖ**Ęō¶ÆÉś²śŠčŅŖ½ā¾öµÄĮķĶāŅ»øöæĪĢā¾ĶŹĒČēŗĪ¼õÉŁĪŖĮĖČĆ×Ō¶ÆÉč±øÓė»śĘ÷ČĖŹŹµ±¶Æ×÷ĖłŠčŅŖµÄ±ą³Ģ¹¤Ź±”£Ķعż³ä·ÖĄūÓĆ”°knowledge”±£¬Å·Ä·ĮśÅ¬Į¦½ā¾öÕāŅ»æĪĢā”£
½«»śŠµŌŚŅŃÓŠÉś²śĻßÉĻѧĻ°µ½µÄ¶Æ×÷Ä£Ź½ŅŌ¼°ŗĪŹ±”¢ČēŗĪ±äøüÉčÖƵČÖŖŹ¶×÷ĪŖ”°Knowledge”±“ę“¢ÓŚ»śŠµÖŠ£¬Ö®ŗóŌŚ¹¹½ØĻąĶ¬µÄÉś²śĻߏ±¾ĶæÉŅŌČĆ»śŠµ×Ō¼ŗ±ą³Ģ£¬“Ó¶ų“ó·ł¼õÉŁČĖ¹¤×÷Ņµ”£ÕāŃł£¬°ŃŅŌĒ°»żĄŪµÄ¹¤³§ÖŠµÄÖŖŹ¶¼ÓŅŌ³ä·ÖĄūÓĆ£¬¾ĶæÉŅŌøł¾ŻŠčĒóŃøĖŁĘō¶ÆÉś²ś”£

ČĆ»śŠµ×Ō¼ŗøŠÖŖ±ä»Æ£¬ŹµĻÖ”°Éś²śĻßĮćŹĀ¹Ź”±
Éś²ś**Ęō¶ÆÖ®ŗ󣬻¹ÓŠŅ»øöĪŽ·Ø»Ų±ÜµÄĪŹĢā¾ĶŹĒ”°²»Į¼Ę·”±”¢”°»śĘ÷¹ŹÕĻ”±µČ”°ŹĀ¹Ź”±µÄ·¢Éś”£ŹĀ¹ŹÖ÷ŅŖæÉŅŌ·ÖĪŖČĖĪŖ²Ł×÷Ź§ĪóµČČĖĪŖŹĀ¹ŹŗĶŅņ»śŠµ¶ųĘšµÄ»śŠµŹĀ¹Ź”£”°Éś²śĻßĮćŹĀ¹Ź”±ĖłĆč»ęµÄÖĘŌģŅµµÄĪ“Ą“¾ĶŹĒŅŖČĆ»śŠµ×Ō¼ŗ½ųŠŠĖ¼æ¼£¬ŌŚŹĀ¹Ź·¢ÉśĒ°¾ĶÄܲģ¾õŹĀ¹ŹŅž»¼£¬·Ą»¼ÓŚĪ“Č»”£
ĪŖĮĖŹµĻÖ”°Éś²śĻßĮćŹĀ¹Ź”±£¬Å·Ä·ĮśÕżŌŚ¼ÓĒæ”°4M“«øŠ”±£¬ĖüÄܹ»¶ŌÉś²śÖŠ±ŲŅŖµÄČĖ£ØMan£©”¢»śŠµ£ØMachine£©”¢²ÄĮĻ£ØMaterial£©”¢·½·Ø£ØMethod£©µČ4øö"M"µÄ±ä»ÆĒéæö½ųŠŠ×¼Č·øŠÖŖ”£Ķ¬Ź±£¬Å·Ä·Įś»¹ŌŚĒæ»ÆÄܹ»»łÓŚ“«øŠŠÅĻ¢Ą“Ō¤²ā²¢·ĄÖ¹ŹĀ¹Ź·¢ÉśµÄAI¼¼Źõ”£
±ČČēĖµ£¬ŌŚ”°ĮćČĖĪŖŹĀ¹Ź”±·½Ćę£¬ĖüÄܹ»øł¾ŻÉś²śĻß¹¤ČĖµÄ¶Æ×÷ŗĶÉķŠÄדĢ¬ØDØDČēŹĒ·ńĘ£ĄĶµČØDØDĄ“¼°Ź±Ō¤²āæÉÄÜ·¢ÉśµÄŹĀ¹Ź£¬²¢½«ŌŅņ¼°øÄÉĘ·½·ØøęÖŖÉś²śĻß¹ÜĄķÕß”£ŌŚ”°Į滜ŠµŹĀ¹Ź”±·½Ćę£¬ĖüÄܹ»×Ō¶ÆĶĘ²āæÉÄÜÓÕ·¢¹ŹÕĻµÄĮć¼žŅŌ¼°øĆĮć¼žµÄŹŁĆü£¬ĶعżŌŚ¹ŹÕĻ·¢ÉśĒ°µÄÉč±øĪ¬»¤ĘŚ¼äøü»»Ļą¹ŲĮć¼ž£¬Ą“·ĄÖ¹æɵ¼ÖĀ³¤ĘŚĶ£²śµÄ“óŠĶŹĀ¹ŹµÄ·¢Éś”£ĮķĶā£¬Ėü»¹æÉŅŌĶعżĢį³ö**µÄĮć¼žøü»»ŗĶÉčÖƱäøü·½°ø£¬°ŃŅ»Š©Äܹ»Į¢¼“½ā¾öµÄÉč±øĪŹĢā”¢Ļą¶Ō½ĻŠ”µÄŹĀ¹ŹµÄ·¢ÉśøÅĀŹæŲÖĘŌŚ**Š”·¶Ī§ÄŚ”£
½üÄźĄ“£¬ĄūÓĆ“óŹż¾ŻµÄÉī¶ČѧĻ°¼¼Źõ¼±ĖŁ·¢Õ¹”£AI¼¼ŹõÓėÄܹ»²¶×½Éś²śŅ»Ļß²»æÉ»ņȱµÄČĖ£ØMan£©”¢»śĘ÷£ØMachine£©”¢²ÄĮĻ£ØMaterial£©”¢·½·Ø£ØMethod£©±ä»ÆµÄ”°4MøŠÖŖ”±Ņ»Ńł£¬ÓČĘäÖŲŹÓŅŌŠ”Źż¾ŻĪŖ»ł“”µÄѧĻ°¼¼Źõ”£ŅņĪŖŌŚŹż¾ŻŹÕ¼Æ¹ż³ĢÖŠ£¬Éś²śĻßÉĻ²»Ņ»¶Ø»įŹĀ¹ŹĘµ·¢£¬ĪŖŌ¤ÖŖŹĀ¹Ź·¢Éś£¬ŠčŅŖ¹¹½Ø¼“Ź¹Ö»ÓŠÉŁĮæŅģ³£Źż¾ŻŅ²ÄܽųŠŠŌ¤ÖŖµÄøß¾«¶ČÄ£ŠĶ”£Å·Ä·Įś²»½ö¼ÓĒæĄūÓĆ“óŹż¾ŻµÄÉī¶ČѧĻ°¼¼Źõ£¬¶ŌŠ”Źż¾ŻŃ§Ļ°¼¼ŹõŅ²½ųŠŠĮĖĒæ»Æ”£
Å·Ä·Įś½«½čÖś”°Įé»īŠŌÉś²śĻß”±”¢”°Éś²śĻßĮćŹĀ¹Ź”±ÕāŅ»Ī“Ą“Ź±“śµÄ¹¤ŅµÖĘŌģ£¬ĪŖÖĘŌģŅµĘóŅµĖł½ųŠŠµÄ”°³¬¼¶Éś²śĮ¦”±”¢”°³¬¼¶Įé»īŠŌ”±µÄĢōÕ½²»¶Ļ×ö³ö¹±Ļ×”£
Å·Ä·ĮśÕ¹ĻÖ”°ČĖÓė»śŠµĻąČŚŗĻµÄĪ“Ą“”±µÄ**¼¼Źõ
×÷ĪŖÅ·Ä·ĮśµÄ**¼¼Źõ£¬ĪŖĪŅĆĒÕ¹ĻÖĮĖŅ»øöŅŌ»śŠµ¼¤·¢ČĖĄąÄÜĮ¦”¢ŹµĻÖČĖ»ś”°ČŚŗĻ”±µÄ**”£ČĖĆĒæÉŅŌĶعżĘ¹ÅŅĒņ¶Ō“ņĄ“ĢåŃéÅ·Ä·ĮśĖł×·Ēó½ØĮ¢µÄČĖÓė»śŠµµÄĪ“Ą“”£
FORPHEUSµÄĆū×ÖÓÉ”°Future Omron Robotics technology for Exploring Possibility of Harmonized aUtomation with Sinic theoretics"”±µÄŹ××ÖÄø×é³É”£ŅāÖøÅ·Ä·Įś»łÓŚ×Ō¼ŗ¶ĄĢŲµÄĪ“Ą“Ō¤²āĄķĀŪØDØD”°SINICĄķĀŪ”±ĖłæŖ·¢µÄ»śĘ÷ČĖ¼¼Źõ”£Ķ¬Ź±£¬ĖüŅ²ŹĒ”°For£ØĆęĻņ£©”±”¢ŗĶ”°ORPHEUS£ØĻóÕ÷ČĖĄą““ŌģŠŌµÄĻ£Ą°Éń»°ÖŠµÄŅ÷ÓĪŹ«ČĖ£©”±ÕāĮ½øö“Ź»ćµÄ×éŗĻ£¬±ķĻÖĮĖÅ·Ä·ĮśÅ¬Į¦¼¤·¢ČĖĄąµÄ““ŌģŠŌŗĶæÉÄÜŠŌµÄ×ĖĢ¬”£
Å·Ä·Įś½«ČĖĄąÓė»śŠµµÄ¹ŲĻµ£¬“Ó¹żČ„µ½Ī“Ą“·ÖĪŖČżøö½×¶Ī”£
**½×¶Ī“śĢę½×¶Ī£ŗ°ŃĪŽŠėÓÉČĖĄą³Šµ£µÄ¹¤×÷½»ÓÉ»śŠµ”°“śĢę”±”£Å·Ä·ĮśŌųæŖÕ¹µÄ¹¤³§×Ō¶Æ»ÆŗĶ×Ō¶Æ¼ģʱ»śµČŅµĪń¾ĶŹōÓŚÕāÖÖĒéæö”£
µŚ¶ž½×¶ĪŠ×÷½×¶Ī£ŗÄæĒ°£¬ČĖĄąÓė»śŠµĻą»„”°Š×÷”±µÄ½×¶ĪŌŚČ«**·¶Ī§ÄŚ²»¶Ļ·¢Õ¹”£±ČČē£¬¹¤³§Éś²śĻßÉĻ²Ł×÷¹¤ČĖÓė×é×°»śĘ÷ČĖ²¢“ę£¬ČƱĖ“ĖÓÅŹĘµĆµ½**·¢»Ó£¬“Ó¶ųĢįøßÉś²śŠ§ĀŹµÄ×ö·Ø¾ĶŹōÓŚÕāÖÖĒéæö”£ĮķĶā£¬Å·Ä·ĮśŅŌŹµĻÖ”°Ć»ÓŠÅöײµÄĘū³µÉē»į”±ĪŖÄæ±ź¶ųæŖ·¢µÄĘū³µ·Ą×²¼¼ŹõŅ²ŹōÓŚĶعżŠµ÷ČĖ**ĻµĄ“ŹµĻÖ°²ŠÄ”¢°²Č«ŗĶŹęŹŹŠŌÉē»įµÄŅ»øöŹµĄż”£
µŚČż½×¶ĪČŚŗĻ½×¶Ī£ŗĻÖŌŚ£¬ĪŅĆĒÕżŌŚ½ųČėČĖĄąÓė»śŠµĻą»„”°ČŚŗĻ”±“Ó¶ų²»¶ĻĄ©“óČĖĄąÄÜĮ¦µÄ½×¶Ī”£Ėę×Å»śŠµ¹ć·ŗČŚČėÉē»įÖ®ÖŠ£¬ČĖĄąĶعż»ńČ”»śŠµµÄÖ§³ÖŹ¹×Ō¼ŗµÄÄÜĮ¦ŗĶæÉÄÜŠŌµĆµ½½ųŅ»²½ĶŲÕ¹”£ĻńFORPHEUSÕāŃłÄܹ»¼¤·¢ČĖĄąÄÜĮ¦ŗĶæÉÄÜŠŌµÄ»śŠµ½«ŌŚø÷øöĮģÓņÖŠ²»¶Ļµ®Éś”£
“«øŠŹż¾ŻĮ÷ĶØŹŠ³””± “Ł½ųÉē»įæĪĢāµÄ½ā¾ö
IoT¼¼ŹõµÄ·¢Õ¹¼ÓæģĮĖČĖĆĒÓ¦ÓĆ“«øŠŹż¾ŻµÄ²½·„£¬µ«ŹĒÄæĒ°µÄĻÖדŹĒ£¬Źż¾ŻµÄĮ÷ĶØ»¹Ķ£ĮōŌŚµ„¶ĄµÄĘóŅµ”¢·žĪńµČĘ½ĢØÄŚ”£Čē¹ūÄܹ»ČĆ“«øŠŹż¾ŻĢų³öĘ½ĢصÄæņ¼Ü½ųŠŠĮ÷ĶØ”¢Ź¹ÓĆŠčĒóŗĶĢį¹©ŠčĒóŹµĻÖ¹ć·ŗ¶Ō½ÓµÄ»°£¬½«ÄÜ“ó“ó“Ł½ųÉē»įæĪĢāµÄ½ā¾ö”£
ĄżČē£¬ĪŖĮĖÕĘĪÕŹ¹ÓĆĒéæö¶ųÉčÖĆÓŚŅ½Ōŗ”¢ŹŠÕžø®”¢³¬ŹŠ”¢³µÕ¾µČø÷ĄąÉ菩µÄ“«øŠĘ÷”£Čē¹ūÄܹ»ČĆÕāŠ©“«øŠŹż¾ŻĮ¬¶ÆµÄ»°£¬æÉŅŌĪŖøƵŲĒųµÄ¾ÓĆńĢį¹©ĆæĢģµÄ**ŠŠ³Ģ·½°ø”£¶ŌÓŚÉ菩µÄŹ¹ÓĆÕߥ“Ėµ£¬æÉŅŌĆāČ„µČ“żŹ±¼ä£¬Ģįøß°ģŹĀŠ§ĀŹ£¬¶ŌÓŚÉ菩Ą“Ėµ£¬ŌņæÉŅŌ»ŗ½āÓµ¼·£¬Ģįøß·žĪńÖŹĮ棬¶ŌĖ«·½Ą“ĖµæÉĪ½¹²Ó®”£
ĮķĶā£¬°ŃĮ½øöø÷×Ō“ęŌŚµÄ“«øŠĘ÷×éŗĻŗ󣬻¹æÉŅŌ½«Ęä×÷ĪŖŅ»øöŠéÄāµÄµŚČż“«øŠĘ÷¼ÓŅŌŹ¹ÓĆ£¬Ą“²āĮæŅ»Š©Č«ŠĀµÄÖø±ź”£±ČČē£¬¼ŁÉčĪŅĆĒŠčŅŖ½ā¾öŅ»øö”°ĄĻÄźČĖÓė¶łĶƼą²ā”±µÄĪŹĢā”£ŅŖ½ā¾öÕāøöĪŹĢā£¬ÖŲµćŌŚÓŚČēŗĪ¹ę±ÜĘČ½üĄĻÄźČĖŗĶ¶łĶƵÄĪ£ĻÕ”£¼“£¬Čē¹ūÄܹ»Ķعż“«øŠĄ“²āĮæ”°Ī£ĻÕ¶Č”±Öø±źµÄ»°£¬¾ĶæÉŅŌ½ųŠŠÓŠŠ§µÄ¼ą²ā”£¶ŌÓŚĪ£ĻÕ¶ČÕāŃłŅ»øöĘł½ńĪŖÖ¹²¢²»“ęŌŚµÄÖø±ź£¬ĪŅĆĒæÉŅŌ½«ĘųĻóŹż¾Ż”¢ĘųĪĀÓėŹŅĪĀŹż¾Ż”¢Ī»ÖĆŹż¾Ż”¢ÉśĆüĢåÕ÷Źż¾ŻµČ“Óø÷Ąą“«øŠĘ÷ÉĻĖł»ńČ”µÄŹż¾Ż½ųŠŠ×éŗĻĄ“¼ÓŅŌ““Éč”£µ±ĪŅĆĒŌ¶³Ģ¼ą²āŅ»Ī»¶Ą¾ÓĄĻČĖŹ±£¬²»ÄܽöĘ¾ĘųĪĀøßÕāŅ»ŅņĖŲ¾ĶĮ¢æĢ¶Ļ¶ØĖū»į³öĻÖĪ£ĻÕ£¬»¹ŅŖ½įŗĻĘäÉķ“¦ŗĪ“¦”¢µ±Ź±µÄÉķĢåדæöµČŅņĖŲĄ“½ųŠŠ×ŪŗĻÅŠ¶Ļ”£Ęł½ńĪŖÖ¹£¬ĪŖĮĖ““ÉčŠĀµÄÖø±ź£¬ŠčŅŖ×ØĆÅÉčÖĆø÷Ąą“«øŠĘ÷ŅŌ»ńČ”ø÷Ąą»ł“”Źż¾Ż”£µ«ŹĒ£¬½ńŗó½čÖś”°“«øŠŹż¾ŻĮ÷ĶØŹŠ³””±æÉŅŌ³ä·ÖĄūÓĆŅŃÓŠ“«øŠĘ÷Ėł²āĮæµÄŹż¾ŻĄ“²ā¶ØŠĀµÄÖø±ź£¬Ļą¶ŌÓŚ×ØĆÅÉčÖĆŠĀµÄ“«øŠĘ÷£¬Ęä¼ņ±ćŠŌŹĒĪŽæɱČÄāµÄ”£
Čē¹ūÄܹ»¶ŌŠĀµÄÖø±ź½ųŠŠ²āĮæµÄ»°£¬ÄĒĆ“¾ĶæÉŅŌøł¾ŻĆæøö¹ĖæĶµÄŠčĒóĄ“½ųŠŠĻøÖĀÓ¦¶Ō£¬Ņ²ÓŠĄūÓŚĢįøßĻÖÓŠÉĢĘ·”¢·žĪńµÄø½¼Ó¼ŪÖµ”£»ņŠķ»¹ÄÜ““Ōģ³öĘł½ńĪŖÖ¹²¢²»“ęŌŚµÄČ«ŠĀÉĢŅµÄ£Ź½”£
ĪŖĮĖŹµĻÖÕāŃłŅ»øöĪ“Ą“£¬Å·Ä·ĮśÕżŌŚÅ¬Į¦½ØÉčŅ»øöæÉŅŌ½«“«øŠŹż¾ŻµÄŹ¹ÓĆŠčĒóÓėĢį¹©ŠčĒó¶Ō½ÓĘšĄ“µÄ”¢ĆęĻņĖłÓŠČĖæŖ·ÅµÄŹŠ³””£Õā¾ĶŹĒ”°“«øŠŹż¾ŻĮ÷ĶØŹŠ³””±”£

µēĘųČż°ü”±·¶Ī§
ÓĆ»§°“²śĘ·ĖµĆ÷ŹéÕżČ·²Ł×÷£¬ŅņÖĘŌģĪŹĢāÕū»ś»ņÖŲŅŖ²æ¼ž²»ÄÜŹ¹ÓĆ£¬¾±¾¹«Ė¾¼¼ŹõČĖŌ±Č·ČĻŗ󣬽ųŠŠ”°Čż°ü”±·žĪń”£
1”¢°üĶĖ¹ę¶Ø£ŗ
ÓĆ»§°“²śĘ·ĖµĆ÷ŹéÕżČ·Ź¹ÓĆŹ±£¬×Ō²śĘ·ŹŪ³öÖ®ČÕĘš7ČÕÄŚ£¬·¢ÉśŠŌÄܹŹÕĻ£ØÖø²śĘ·“ļ²»µ½ŅŖĒ󣬓ęŌŚĪ£¼°ČĖÉķ”¢²Ę²śµÄĪ£ĻÕ»ņ²»¾ß±øÓ¦µ±¾ß±øµÄŹ¹ÓĆŠŌÄÜµČ£©£¬æĶ»§æÉŅŌŃ”ŌńĶĖ»õ”¢»»»õ»ņŠŽĄķ£¬ĶĖ»õŹ±£¬°“ĻśŹŪ¼ŪøńŅ»“ĪŠŌĶĖĒ唣
2”¢°ü»»¹ę¶Ø£ŗ
ÓĆ»§°“²śĘ·ĖµĆ÷ŹéÕżČ·Ź¹ÓĆŹ±£¬×Ō²śĘ·ŹŪ³öÖ®ČÕĘš30ČÕÄŚ£¬·¢ÉśŠŌÄܹŹÕĻ£ØÖø²śĘ·“ļ²»µ½ŅŖĒ󣬓ęŌŚĪ£¼°ČĖÉķ”¢²Ę²śµÄĪ£ĻÕ»ņ²»¾ß±øÓ¦µ±¾ß±øµÄŹ¹ÓĆŠŌÄÜµČ£©£¬æĶ»§æÉŅŌŃ”Ōń»»»õ»ņŠŽĄķ£¬»»»õŹ±£¬æĶ»§µ÷»»Ķ¬ŠĶŗÅĶ¬¹ęøńµÄ²śĘ·”£
3”¢°üŠŽ¹ę¶Ø£ŗ
ÓĆ»§°“²śĘ·ĖµĆ÷ŹéÕżČ·Ź¹ÓĆŹ±£¬×Ō²śĘ·ŹŪ³öÖ®ČÕĘš1ğČ£¬·¢ÉśŠŌÄܹŹÕĻ£ØÖø²śĘ·“ļ²»µ½ŅŖĒ󣬓ęŌŚĪ£¼°ČĖÉķ”¢²Ę²śµÄĪ£ĻÕ»ņ²»¾ß±øÓ¦µ±¾ß±øµÄŹ¹ÓĆŠŌÄÜµČ£©£¬æĶ»§æÉŅŌŃ”ŌńĆā·ŃµÄ·žĪń

ĻśŹŪÅ·Ä·ĮśĻµĮŠ²śĘ·£¬Ö÷ŅŖ¹©Ó¦ĒųÓņÓŠ»Ŗ¶«µŲĒų”¢»ŖÄĻµŲĒų”¢»ŖÖŠµŲĒų”¢»Ŗ±±µŲĒų”¢Ī÷±±µŲĒų”¢Ī÷ÄĻµŲĒų”¢¶«±±µŲĒų
ĖÄ“ØŹ”£ŗ³É¶¼”¢ĄÖɽ”¢ŃÅ °²”¢¹ć°²”¢ÄĻ³ä”¢×Ō¹±”¢ćņÖŻ”¢ÄŚ½”¢ŅĖ±ö”¢¹ćŌŖ”¢“ļÖŻ”¢×ŹŃō”¢ĆąŃō ”¢Ć¼É½”¢£»
ɽ¶«Ź”£ŗ¼ĆÄĻ”¢Ī«·»”¢×Ķ²©”¢”¢Ōę×Æ”¢Ģ©°²”¢ĮŁŅŹ”¢¶«ÓŖ”¢¼ĆÄž”¢ŃĢĢØ”¢ŗŹŌó”¢ČÕÕÕ ”¢µĀÖŻ”¢ĮÄ ³Ē”¢£»
°²»ÕŹ”£ŗŗĻ·Ź”¢Īßŗž”¢ŁńÖŻ”¢Āķ°°É½”¢³ŲÖŻ”¢»“ÄĻ”¢»“±±”¢°ö²ŗ”¢³²ŗž”¢°²Ēģ ”¢ĖŽÖŻ”¢Šū³Ē”¢³üÖŻ”¢Įł°²”¢£»
:ĪŚĀ³Ä¾Ęė”¢æĖĄĀźŅĄ”¢ŅĮÄž”¢æ¦Ź²”¢æüĶĶ”¢ŹÆŗÓ×Ó”¢¹žĆÜ ”¢æā ¶ūĄÕ”¢²ż¼Ŗ”¢°¢æĖ”¢ĖÕ”¢ŗĶĢļ”¢°¢¶ūĢ©”¢Ėž³Ē”¢ĶĀĀ³·¬”¢²©ĄÖ”¢°¢Ķ¼Ź²”¢ø·æµ”¢ĪŚĖÕ£»
ÄŚ£ŗ ŗōŗĶŗĘĢŲ”¢ŗōĀ×±“¶ū”¢°üĶ·”¢³ą·å”¢ĪŚŗ£”¢ĶØĮÉ”¢¶õ¶ū¶ąĖ¹”¢ĪŚĄ¼²ģ²¼”¢°ĶŃåÄ׶ū £»
ɽĪ÷Ź”:Ģ«Ō”¢ “óĶ¬”¢ŃōČŖ”¢³¤ÖĪ”¢ĮŁ·Ś”¢½śÖŠ”¢ŌĖ³Ē”¢½ś³Ē”¢ŠĆÖŻ”¢Ė·ÖŻ”¢ĀĄĮŗ”¢£»
ŗÓ±±Ź”£ŗ”¢ŹÆ¼Ņ×Æ”¢±£¶Ø”¢ ĒŲ»Źµŗ”¢ĢĘɽ”¢ŗŖµ¦”¢ŠĻĢØ”¢²×ÖŻ”¢³ŠµĀ”¢ĄČ·»”¢ŗāĖ®”¢ÕżŅæŚ £»
ÄžĻÄ£ŗŅų“Ø”¢¹ĢŌ”¢ĒąĶĻ攢ŹÆ ×ģɽ”¢ÖŠĪĄ£»
Ēąŗ£Ź”£ŗ”¢Ī÷Äž£»
øŹĖąŹ”£ŗ”¢Ą¼ÖŻ”¢°×Ņų”¢ĪäĶž”¢½š²ż”¢Ę½Į¹”¢ÕÅŅ“”¢¼ĪÓų¹Ų”¢ ¾ĘČŖ”¢ĒģŃō”¢¶ØĪ÷”¢Ā¤ÄĻ”¢ĢģĖ®£»
ÉĀĪ÷Ź” £ŗĪ÷°²”¢ĻĢŃō”¢ÓÜĮÖ”¢±¦¼¦”¢Ķ“Ø”¢Ī¼ÄĻ”¢ŗŗÖŠ”¢°²æµ”¢ ÉĢĀ唢ŃÓ°²£»
£ŗ”¢°¢Ąļ£»
ŌĘÄĻŹ””¢Ą„Ć÷”¢ÓńĻŖ”¢“óĄķ”¢Ēś¾ø”¢ÕŃĶØ”¢±£É½”¢Ąö½”¢ ĮŁ²×£»
¹óÖŻŹ”£ŗ”¢¹óŃō”¢ °²Ė³”¢×ńŅ唢ĮłÅĢĖ®£»
¹ćĪ÷Ź”£ŗÄĻÄž”¢ŗŲÖŻ”¢ĮųÖŻ”¢¹šĮÖ”¢ĪąÖŻ”¢ ±±ŗ£”¢ÓńĮÖ”¢ĒÕÖŻ”¢°ŁÉ«”¢·Ą³ĒøŪ”¢¹óøŪ”¢ŗÓ³Ų”¢³ē×ó”¢Ą“±ö£»
ŗžÄĻŹ”£ŗ³¤É³”¢³»ÖŻ”¢Ā¦µ×”¢ŗā Ńō”¢ÖźÖŽ”¢ĻęĢ¶ ”¢ŌĄŃō”¢³£µĀ”¢ÉŪŃō”¢ŅęŃō”¢ÓĄÖŻ”¢ÕżŅ½ē”¢»³»Æ£»
ŗž±±Ź”£ŗ¾£ĆÅ”¢ĻĢÄž”¢Ļå·®”¢¾£ ÖŻ”¢»ĘŹÆ”¢ŅĖ²ż”¢ĖęÖŻ”¢¶õÖŻ”¢Š¢øŠ”¢»ĘøŌ”¢Ź®Ńߣ»
ŗÓÄĻŹ”£ŗÖ£ÖŻ”¢ĀåŃō”¢½÷”¢ÉĢĒš”¢ŠÅŃō”¢ ŠĀĻē”¢°²Ńō”¢æŖ·ā”¢äšŗÓ”¢ÄĻŃō”¢ŗ×±Ś”¢Ę½¶„ɽ”¢£»
å§Ńō”¢Šķ²ż”¢ÖÜæŚ”¢ČżĆÅĻ攢פĀķµź”¢¼ĆŌ“£»
½Ī÷Ź”£ŗÄĻ²ż”¢øÓÖŻ”¢¾°µĀÕņ”¢¾Å½”¢Ę¼Ļē”¢ŠĀÓą”¢ø§ÖŻ”¢ŅĖ“ŗ”¢ÉĻČÄ”¢Ó„Ģ¶”¢¼Ŗ °²£»
ŗŚĮś½£ŗ ”¢ŅĮ“ŗ”¢Äµµ¤½”¢“óĒģ”¢¼¦Ī÷”¢ŗ×øŚ”¢Ėē»Æ”¢Ė«Ń¼É½”¢ĘßĢØŗÓ”¢¼ŃľĖ¹”¢ŗŚŗÓ”¢Ęė¹ž¶ū£»
¼ŖĮÖŹ”£ŗ¼Ŗ ĮÖ”¢ĶػƔ¢°×³Ē”¢ĖÄĘ½”¢ĮÉŌ“”¢ĖÉŌ”¢°×ɽ£»
ĮÉÄžŹ”£ŗ”¢ÅĢ ½õ”¢°°É½”¢ø§Ė³”¢±¾ĻŖ”¢ĢśĮė”¢½õÖŻ”¢ µ¤¶«”¢ĮÉŃō”¢ŗłĀ«µŗ”¢ø·ŠĀ”¢³ÆŃō”¢ÓŖæŚ£»
Õć½Ź”£ŗŗ¼ÖŻ”¢ÉÜŠĖ”¢ĪĀÖŻ”¢ŗžÖŻ”¢¼ĪŠĖ”¢ĢØÖŻ”¢½š»Ŗ”¢ ÖŪɽ”¢įéÖŻ”¢ĄöĖ®£»
¹ć¶«Ź”£ŗ½ĆÅ”¢·š ɽ”¢Õæ½”¢ÉŲ¹Ų”¢ÖŠÉ½”¢ĆÆĆū”¢ÕŲĒģ”¢Ńō½”¢»ŻÖŻ”¢³±ÖŻ”¢½Ņ Ńō”¢ĒåŌ¶£»
ŗÓŌ“”¢”¢ŌĘø”£»
ø£½ØŹ”£ŗø£ÖŻ”¢ČŖÖŻ”¢ÕÄÖŻ”¢ÄĻĘ½”¢ČżĆ÷”¢ĮśŃŅ”¢ĘĪĢļ”¢ÄžµĀ”£
¹ćĖ®£»ŗŗ“Ø£»ŹÆŹ×£»ŗéŗž£»ĖÉ×Ģ£»Āé³Ē£»ĪäŃØ£»³ą±Ś£»¶÷Ź©£»Ąū“Ø£»ĖęÖŻ£»ĻÉĢŅ£»Ē±½£»ĢģĆÅ£»äÆŃō£»õ·Įź£»ĻęĻē£»ÉŲɽ£»ńēŃō£»³£Äž£»ĪäøŌ£»ćéĀŽ£»ĮŁĻę£»½ņ£»ćä½£»×ŹŠĖ£»ŗé½£»ĄäĖ®½£»Į°Ō“£»¼ŖŹ×£»·¬Ų®£»»Ø¶¼£»Ōö³Ē£»“ӻƣ»ĄÖ²ż£»ÄĻŠŪ£»³±Ńō£»³Īŗ££»Ė³µĀ£»ÄĻŗ££»ČżĖ®£»øßĆ÷£»ĢØɽ£»ŠĀ»į£»æŖĘ½£»ŗ×ɽ£»¶÷Ę½£»Į®½£»Ą×ÖŻ£»Īā“Ø£»øßÖŻ£»»ÆÖŻ£»ŠÅŅĖ£»øßŅŖ£»ĪŚĖÕ£»°¢ĄÕĢ©£»ÉĻŗ££»ÖŲĒģ£»°²»Õ£»ŗĻ·Ź£»Īßŗž£»»Ęɽ£»°²Ēģ£»°ö²ŗ£»³²ŗž£»³ŲÖŻ£»³üÖŻ£»ø·Ńō£»»“±±£»Įł°²£»Āķ°°É½£»ĖŽÖŻ£»ĶĮź£»Šū³Ē£»»“ÄĻ£»ø£½Ø£»ø£ÖŻ£»ĘĪĢļ£»ÄĻĘ½£»ĻĆĆÅ£»ČŖÖŻ£»ÕÄÖŻ£»ČżĆ÷£»ĮśŃŅ£»øŹĖą£»Ą¼ÖŻ£»¼ĪÓų¹Ų£»ÕÅŅ“£»ĢģĖ®£»¹ć¶«£»¹ćÖŻ£»ĒåŌ¶£»ÉŲ¹Ų£»ŗÓŌ“£»Ć·ÖŻ£»³±ÖŻ£»ÉĒĶ·£»½ŅŃō£»£»»ŻÖŻ£»¶«Żø£»ÉīŪŚ£»Öéŗ££»ÖŠÉ½£»½ĆÅ£»·šÉ½£»

ĪĀÖŻ½ņĢģµēĘųÓŠĻŽ¹«Ė¾»¶ÓÄś
×ÉŃƵē»°18057774865

